|

|
Photo 1 : Although there are one legged robots (to the MIT Leg Laboratory), 2 legged robots performing are represented by the Honda Asimo, very successful with its humanoid form mimicking to perfection the walking and running of man. It goes up and down stairs, but if it falls, it seemed unable to recover, but it was improved.
http://asimo.honda.com/
|
|

|
Photo 2 : Models like the Big Dog with petrol engine and hydraulic pumps from Boston Dynamics can walk 5 km / h with 50 kg of cargo without tipping and imitate the jump and kick of the horse : impressive !
http://www.blog-note.com/robots-psp-combats-et-guerre/
|
|
Photo 3 : Famous forerunner, Shigeo Hirose, Director of the Institute of Technology of Tokyo began in 1976 his research on legged vehicles with Kumo I. Then followed a series of walking robots of all kinds including Roller-Walker (1995-present) (photo) that can walk but also run with self-adaptable no drive wheels to end legs : thanks to particular movements of its legs imitating a skater spreading and strengthening their skates : it moves forward and steer.
http://www-robot.mes.titech.ac.jp/robot/walking/rollerwalker/rollerwalker_e.html
|
|

|
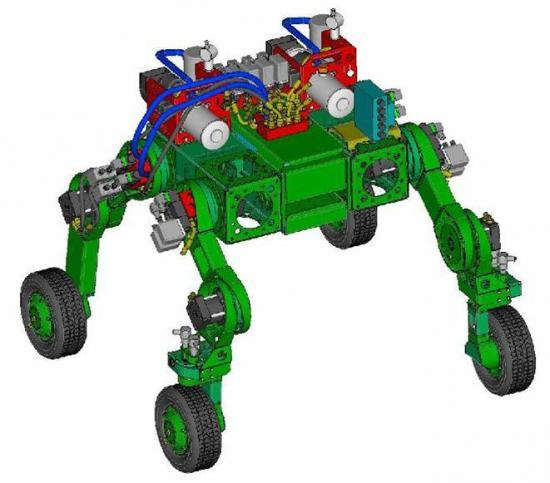
Photo 4 : Lauron III, built at FZI of Karlsruhe, advance through its 6 feet to 3 degrees of freedom and its 3 directions sensors feet. A laser and landforms recognition software associated with numerous sensors enable local navigation on unstructured terrain. http://www.fzi.de/index.php/de/forschung/forschungsbereiche/ispe/abteilungen/ids/themen-und-projekte/projekte/5987-projekt-lauron-ivc
|

|
Photo 5 : Rhex, of Universities of Michigan and California, is equipped with 6 legs that rotate like wheels. Like cockroaches, it can move anywhere and even upside down on the sand, mud, on rocks. He can also jump, do a back somersault. This robot simple and really off-road is a success. An amphibious version exists and it is now marketed.
http://www.boston
dynamics.com/robot_rhex.html
|
|

|
Photo 6 : Halluc II of Chiba Institute of Technology with 8 articulated legs themselves equipped with wheels offers many opportunities for advancement.
http://www.zobot.ru/blog/8
http://robot.watch.impress.co.jp/cda/news/2008/07/04/1161.html
|
|
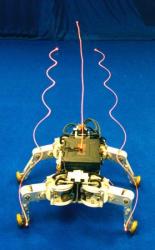
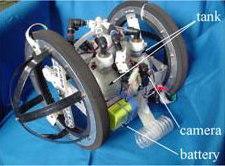
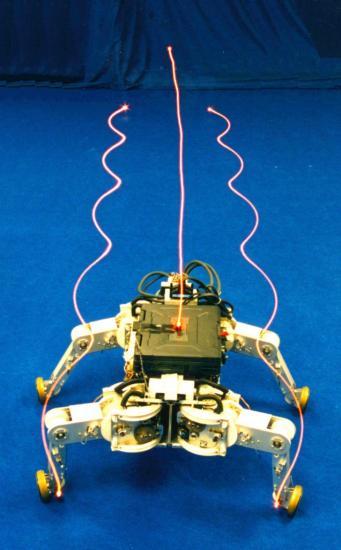
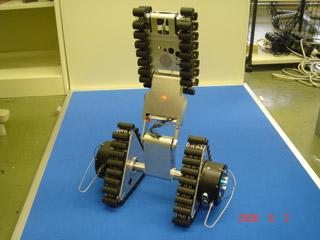
Photo 7 : Equipped with a pneumatic system, the 2 wheeled robot Leg-in-Robot V can also jump on or over obstacles. Two electric wheels enable it to run on relatively flat terrain. It is designed to help in rubble cluttered building with enough space for the jump.
http://www.asimo.pl/
modele/leg-in-rotor.php
|
|

|
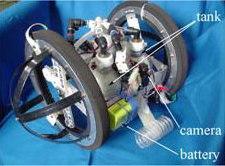
Photo 8 : Shigeo Hirose has built in 1995-97 an omnidirectional 3 wheels planetary exploration robot, the Tristar. Chassis is deployed at the exit of the container and the wheels are expandable.
http://www-robot.mes.titech.ac.jp/robot/spaceprobe/tristar/tristar_e.html
|

|
Photo 9 : Exploration articulated 4x4 Nanorover spring spoked wheels LAMAlice in 1999 at the Ecole Polytechnique Fédérale de Lausanne (EPFL).http://projects.asl.ethz.ch/robox/database/other%20robots/page_01.htm
|
|

|
Photo 10 : The suspension system of Sojourner Rocker Bogie's JPL (Jet Propulsion Laboratory) of NASA is best known through the expeditions on Mars. It is a simple passive system in balance.
http://www.jpl.nasa.gov
/news/archives.cfm?
start_row=31&theme=Technology
|

|
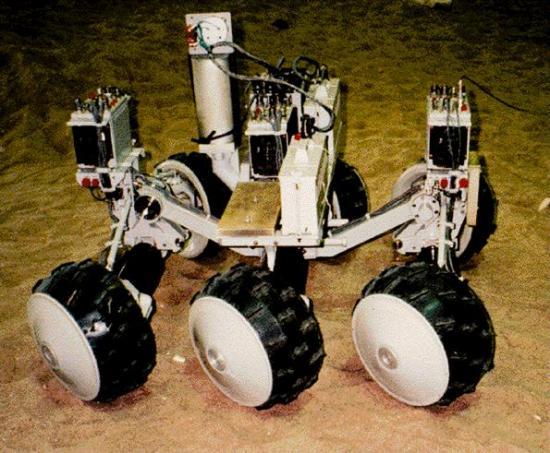
Photo 11 : The Marsokhod studied in St. Petersburg was tested in the U.S. and France, especially at INRIA Toulouse. It was part of the European expedition in March 1998, which ended in failure. Fully articulated liabilities, the frame can still elongates (inching system) for easier moving on steep slopes.
http://hakenberg.de/automation/marsokhod.htm
|
|

|
Photo 12 : This gave birth to Iarès tested at INRIA of Toulouse. Equipped with independent wheels, it can remain horizontal on the slopes.
http://exploration.esa.int/science-e/www/object/index.
cfm?fobjectid=50370
|

|
Photo 13 : The Shrimp of BlueBotics, company affiliated with the EPFL, is an original articulated 6x6. The passive joints and arms fit the profile of the terrain. Designed for planetary exploration, it was also thought to use for disabled mobility.
http://www.euron.org/intro/index6
http://www.bluebotics.
com/mobile-robotics/shrimp-3
|
|

|
Photo 14 : Eight wheels Athlete of Brian Wilcox of JPL for NASA's Mars exploration can climb slopes horizontally with large articulated arms.
http://www-robotics.jpl.
nasa.gov/systems/systemImage.cfm?System=11&Image=331
|

|
Photo 15 : 8x8 Octopus of EPFL has sensors in the rims of wheels for controlling the movement of articulated arms in the direction that overcomes obstacles.
|
|

|
Photo 16 : Genbu, firefighter robot of S. Hirose, can have 20 wheels on a chassis made of a flexible hose.
http://www.robot.mes.
titech.ac.jp/robot/snake/
genbu/genbu_e.html
|
|

|
Photo 17 : The Toolkit of Collineo and DRDC (Defence R & D Canada) has legs in two parts.
The Collineo Company, Drummondville, Quebec, a service company helping high-tech industries in the areas of civil protection and field operations, creates all-terrain robots such as micro-hydraulic reconfigurable Toolkit 4 or 6 wheels, in collaboration with DRDC Suffield. It includes suspension arm in two parts and 14 degrees of freedom with electric motors or hydraulic units. These arms can best bridge and climb the difficult slopes by reducing the action of the wheels at the expense of arms that mimic walking : the center of gravity moves (inching system or peristaltic mode) without the wheels. The robot Hylos of the Institute for Intelligent Systems and Robotics, Paris, and Work Partner of Helsinki University, Finland have also articulated arms with wheels. The articulated 6x6 Marsokhod robot too, originally studied in Saint Petersburg by the Company Transmash, has an expandable frame (but no legs) that allows it to accompany action of wheels.
http://www.collineo.net/
|
|

|
Photo 18 : Not exactly tracked, the ELMS (Elastic Loop Mobility System) is the prototype of a planetary exploration system for years 70's and 80's and consists of titanium rolling curved rings. This new concept, lighter, gains climbing ability.
http://www.frc.ri.cmu.edu/~hpm/project.archive/Image.Archive/Computer.Museum.1987/Mars%20Rover%20Hard
ware%20Prototype.jpg
|
|

|
Photo 19 : The robot Aurora Automatika in Pennsylvania built by Hagen Schempf in 1999, consists of a single and directional track. Novel !
https://www.dndkm.org/Technology/TechnologyFactSheet.aspx
?TechnologyID=394
|

|
Photo 20 : The University of Wuerzburg built this robot, a two tracked Nanokhod more an articulated pendulum used as a weight-cons, itself made of a caterpillar. It can move horizontally on the slopes.
http://www.vh-s.de/en/projectexamples/spacerovers/nanokhod
|
|

|
Photo 21 : Chiba Institute of Technology built the Hibiscus. It is equipped with 2 central tracks covering the entire width of the machine. Four additional tracks to the front and rear can execute complete rotations and behave as rotating legs.
http://www.nippon.com/en/views/b00904/
|

|
Photo 22 : Featuring 2 triangular tracks, SNR1 of the AIST (National Institute of Advanced Industrial Science and Technology) has another one at the rear like an articulated tail.
http://staff.aist.go.jp/kamimura.a/
|
|
|
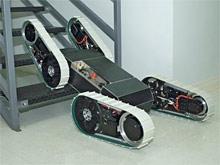
Photo 23 : The STRV Shape-Shifting Tracked Robotic Vehicle by DRDC, Defence Research and Development, Suffield, Alberta, looks like the Telemax of the University of Bremen and the "KOHGA2" from Fumitoshi Matsuno, University of Electro-Communications, Japan or the Chaos of Autonomous Solutions, West Petersboro, Utah, which has the same configuration.
http://www.cbc.ca/news/background/tech/robotics/military.html
|
|
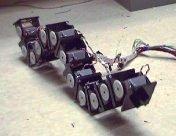
Photo 24 : More like Polybots of PARC (Palo Alto Research Center, a subsidiary of Xerox), use vertical creep like caterpillars of butterflies.
http://www.sciencedirect.com/science/article/pii/S0020025503000653
|
|

|
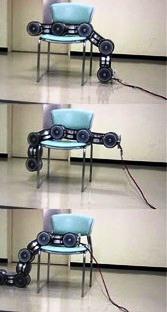
Photo 25a : S. Hirose had the idea of making the drive wheels of the ACM-R4. Here, the robot can then climb on a chair without actually crawling.
http://www-robot.mes.titech.ac.jp/robot/snake/acm-r4/acm-r4_e.html
|
|

|
Photo 25b : S. Hirose had the idea of making the drive wheels of the ACM-R4. Here, the robot can then climb on a chair without actually crawling.
http://www-robot.mes.titech.ac.jp/robot/snake/acm-r4/acm-r4_e.html
|




















 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa