33 WALKING, HOPPING, SPHERICAL AND WSL ROBOTS AND VEHICLES
 |
Multi-Ped Walking Tractor, built between 1947 and 1949 by Multi-Ped Traction Ltd, Edmonton, Alberta on Case Model R Tractor by Edward Snell and Aimee Dragon. They wanted to move on muskeg by walking rather than roll with wheels which sunk. Walking is a kind of dream for humans but it is not said if this heavy Multi-Ped was successful. Pict Francis Pierre at Reynolds-Alberta Museum, Canada in 2001. http://www.theoldrobots.com/Walking-Robot4.html |
 |
Multi-Ped Walking Tractor, 1947-49. See Chap 'Walking Machines". Pict posted by Robert Graumann on the site http://www.practicalmachinist.com/vb/antique-machinery-history/ot-crawler-tractors-196276/index17.html |
 |
Cybernetic Walking Machine, General Electric proto of the late 60s intended to carry loads over rough terrain, now showed at Ft Eustis Transportation Museum, VA. http://cyberneticzoo.com/?p=2032 |
 |
Plustech Oy Ltd walking forest machine from 1997, by Timberjack, Finland, bought by J Deere in 2006. See Chap 'Self Leveling Vehicles'. http://www.pakwheels.com/forums/4x4-clubs-off-roaders-suv/108184-earth-movers-2 |
 |
Littman Walking Machine. Erwin Littman, Indiana, took this patent in 1983. This machine looks like the Berky machines, http://www.berky.de/index.php?ID=1040. Pict from 'Revue des Engins', AIPETHOAC of Francis Pierre, 2011 12 supplement and http://static3.patentgenius.com/55880/34512/4558758-2.gif |
 |
Spring Walker by Applied Motion, Inc., 2010 is a 'mechanical spring-loaded bipedal walking frame' that assists in the walking motion. SpringWalker is spring-assisted and lower-body exoskeleton amplifies the speed and range of a motion. http://rareunlimited.com/2011/03/23/springwalker-running-exoskeleton/ |
 |
Rise robot of Boston Dynamics http://www.bostondynamics.com/robot_rise.html |
 |
Walking Cargo Carrier, a study for US Army in the 70s. http://cyberneticzoo.com/?p=2032 |
 |
Scale model of Mavag/Fiat 'Mocher Wagen', 1923 with feet propulsion replacing conventional rear wheels. The author saw at Retromobile in the 80s at Paris a movie of a similar French walking machine, but without front wheels, scale 1. No more is known. Pict from the review 'Wheels and Tracks' N° 61 about 1998. |
 |
Walking Excavator pictured on 16-11-2008, seen on the Net on a Swedish site. No more is known. Strange machine !! See Chap 'Walking Machine' in Group 'Locomotion'http://www.maskinisten.net/userpix/4944_grv_x4_2.jpg |
 |
Bibaut Excavator. Bibaut Cie, Le Meux, France, designs, tests, uses and rents equipment for working in aquatic environments. It conceived a walking excavator in the 80s. http://www.bibaut-environnement.fr/
|

  |
Aquatic excavator. http://forum.index.hu/Article/showArticle?go=62271058&t=9020005
Amphibious Dredgers Excavator 40 and 30 type of 13.5 t, from Wuhan Machinery, Wuhan, China. http://www.topfreebiz.com/product/2602796/Amphibious-Dredgers.htm
|
 |
Dredging Boat can walk to get in or out water. From Schröer Environment and Water Technology, GmbH & Co. KG., Haren, Germany. http://www.senwatec.com/dredging-boats.html |
 |
Amphibian Multipurpose dredger manufactured by M/s Perfect Dredging Company Pvt. Ltd., Chennai, India. http://www.perfectdredge.in/equipments.htm |
 |
Watermaster Amphibious, 1995, is a multipurpose (suction, dredging, pile driving) floating dredge which can move in water, walk in and out water without any assistance with its 'legs'. It is also fitted with anchors. Manufacturer is Aquamec Ltd, Sâkylä, Finland http://www.watermaster.fi/technology-mobility.html Lower left picture is from : ABS-CBN Cotabato and Rolly Roque, ABS-CBN News : http://pinoyjourn.wordpress.com/2011/06/30/in-flood-hit-cotabato-life-goes-on/ |
 |
Aquarius Systems Amphibious Excavator. The 3 adjustable legs stabilize the barge mounted backhoe. Stabilizer wheels provide flotation when extended and act as stabilizers when positioned under the boat. Wheels and legs enable excavator to go in or out the water. http://www.aquarius-systems.com/Pages/65/excavators.aspx |
 |
Berky moving machines for banks, self-propelled. This is a slope mover, from Germany. See also chap 'self-leveling vehicles' http://www.berky.de/index.php?ID=1040 |
 |
Amphibious Dredgers Excavator 40 and 30 type of 13,5 t. from Wuhan Machinery, Wuhan, China. See also chap 'Self-leveling vehicles' |
 |
Straddle tractor in agriculture, 2000. Pict from review 'Ca m'intéresse', 2001. |
 |
Kobelco tracked crane, 2006, with walking excavator like stabilizers. Pict J M M at Intermat, Villepinte, 2006 04. |
 |
Hinowa Crane with stabilizers. Like walking excavators, these tracked tractors can stand on flat ground or slopes but without moving. They can take ideas to a true vehicle for slopes, like walking excavators ? Robot TitanXI of Shigeo Hirose looks like that. Pict J M M at Intermat, Villepinte, 2006 04. |
|
|
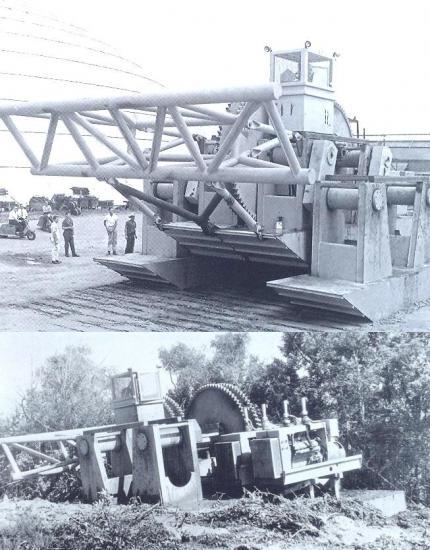
LeTourneau Tree Stomper of 1964 was a walking vehicle of the same principle of walking draglines. It was used for land clearing job in Dare Country, North Carolina. 120 t, 475 hp Detroit Diesel. Tree Stomper sits today at the same place. Upper picture from the book 'R.G. LeTourneau Heavy Equipment' by Eric Orleman, Iconografix, 2008. Lower picture from book ‘The LeTourneau Legend’ by Philip G. Gowenlock, Paddington Publications Pty. Ltd, 1996. |
 |
US003366192-001 LeTourneau Tree Stomper Walking vehicle patent, 1964. |
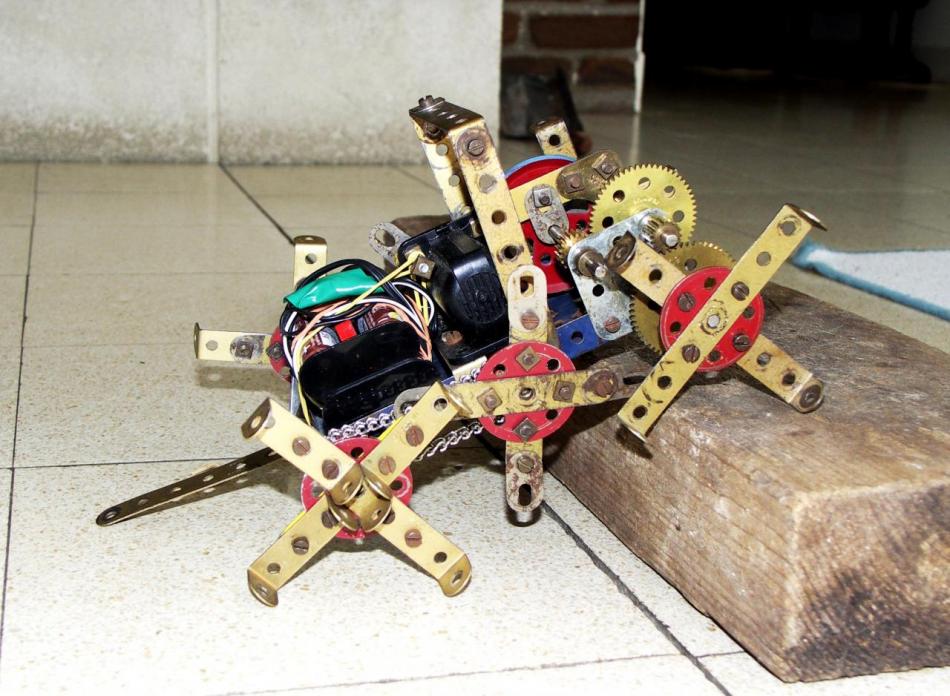 |
Wheel-leg vehicle as Whegs robots of Case Western Reserve University, built with Meccano/ Erector by J M M, 2009 06. |
 |
Thistle Sphere robot, 1993, from ESA, European Space Agency, program ARIADNA, called Thistle rover of Helsinki University. This spherical rover for planetary exploration could move rapidly over complex and unpredictable terrain helped by wind. Propulsion of Nasa Tumbleweed rover and motorized unbalanced mass from the Rollo ball-shaped robot were the same principle. http://autsys.tkk.fi/en/Research/Space |
 |
COF3200. « COF » of Cofrexport is a surveillance robot fitted with cameras for moving in water or land. 25 kg, 65 cm dia. The drive is provided by a pendulum that moves a mass inside the sphere and therefore the robot roll on itself to move forward, or change direction http://forcesoperations.com/2012/06/14/bizarre-vous-avez-dit-bizarre/backward |
 |
ELE, European Lunar Explorer, spherical robot from Romania's ARCA group. http://www.msnbc.msn.com/id/23284596/ns/technology_and_science-space/t/teams-shoot-moon/#.UKsaO6Oa9lo |
 |
Throw bot XT of Recon Robotics, Edina, MN, weights 540 g, radio controlled. It can be thrown to 36 m for surveillance. All terrain with 2 wheels and a tail. Pict J M M at Villepinte, June 2012. http://www.reconrobotics.com/ |
 |
Soft Spherical and soft wheel robot of Shinichi Hirai, Shiga, Japan. These robots are capable off rough terrain locomotion by its rolling and jumping. A robot consisting of deformable soft body and flexible actuators can roll and jump on the ground by the deformation of its body. http://www.ritsumei.ac.jp/se/~hirai/research/softrobot-e.html |
|
|
Spherical Robots. From L to R, downwards : Spherical robot of Nils Völker, 2009, Rotodus AB, Sweden, 2005, Swarm 2, 2008, Groundbot, 2008, Inside the sphere, a pendulum is moved by an engine in a direction to displace center of gravity of the set and robot goes ahead. To turn right or left, the pendulum is displaced right or left. It seems the sphere can roll on flat ground (mud, snow, sand) but only little obstacles can be overcome. Used for surveillance. http://www.nilsvoelker.com/nxt/spherical/index.html |

|
|
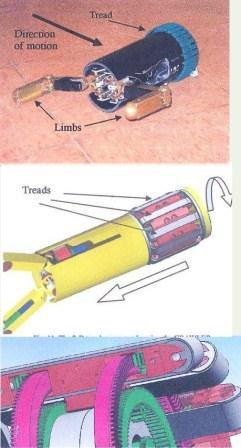
Terminatorbot Crawler Robot, 2008, from University of Denver, Colorado, moves with its limbs, also used as manipulators. In addition, a set of tracks (or 2 additional limbs) at the rear could help the bot to move forward (parallel to the tracks) or transversely (perpendicular to the tracks) thanks to an epicyclical train. http://www.engr.du.edu/richard/Pubs/crabBot.SSRR08.pdf |
|
|
4x4 Sandia hopping robot can jump, with one mighty leg, onto or over obstacles more than 7 m high. https://share.sandia.gov/news/resources/news_releases/sandia-hopping-robots-to-bolster-troop-capabilities/ |

 |
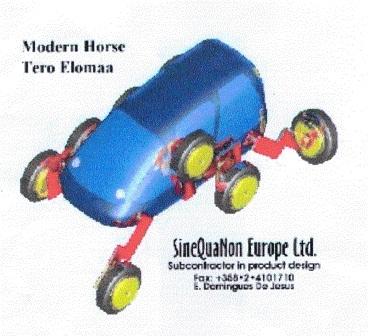
Wheeled-Leg PAW robot, 2005, could walk, jump and roll with its wheels, driven or not. From University Mc-Gill and DRDC Suffield, Canada. http://www.youtube.com/watch?v=PdSC2RGbv1g http://www.youtube.com/watch?feature=endscreen&NR=1&v=koTvt34b0AE
|

|
|
Athlete robot, 2008, conceived by Brian Wilcox of JPL, Jet Propulsion Laboratory for Moon exploration. http://robonaut.jsc.nasa.gov/R1/field-ops/rockyard06.asp |

|
|
Odex 1 robot from Odetics Inc., Anaheim, 1983. With a mass only 136 kg, each leg could lift 181 kg. Odex was able to lifting over 952 kg vertically or carrying 1315 kg. As seen on the picture, it could get on a truck without a ramp. Impressive ! http://cyberneticzoo.com/?p=2462 |

|
|
SYMBRION, Symbiotic Evolutionary Robot Organisms, Project of 12 Europeans countries whose France at INRIA, Roquencourt. http://www.inria.fr/centre/saclay/actualites/petits-robots-pour-realiser-de-grandes-choses |

|
|
Trojan Horse 8x8 hybrid robot. |
|
|
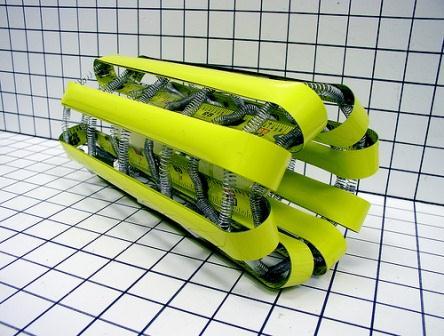
WSL, Whole Skin Locomotion robot, 2008, of Romela, University of Virginia, inspired by Amoeba locomotion where outer ectoplasm moves around endoplasm causing forward movement of the whole. It can squeeze through small spaces. Pict from RoMeLa : Robotics and Mechanisms Laboratory. http://www.romela.org/main/WSL:_Whole_Skin_Locomotion |

ASV Adaptive Suspension Vehicle, Walking Machine, 1984, from Ohio State University. Mass 2600 kg, ground clearance 1,4 m, length 5 m, The vehicle can cross ditch 1,8 m wide, climb step 1,7 m up and down, max slope 60%. Picture of J.R. Fitzsimons, Ohio State University, from review 'Science et Vie', Feb 1986.

Metriqc walking machine, 2001, of Ecole de Technologie Supérieure du Quebec, University at Rimouski.

 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa
{kind=link}