32 TRACKED AND SNAKE-LIKE ROBOTS
 |
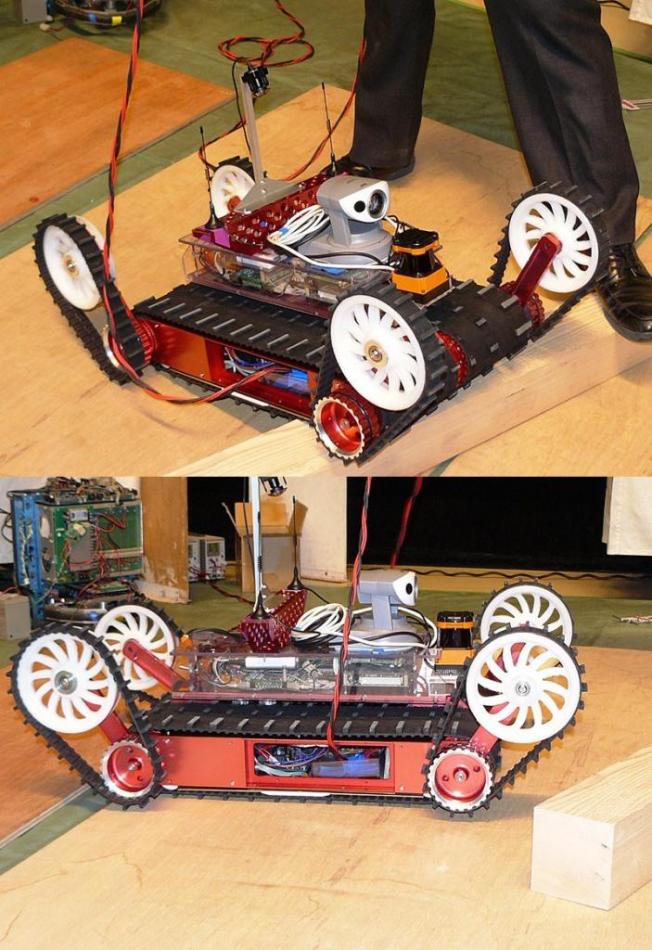
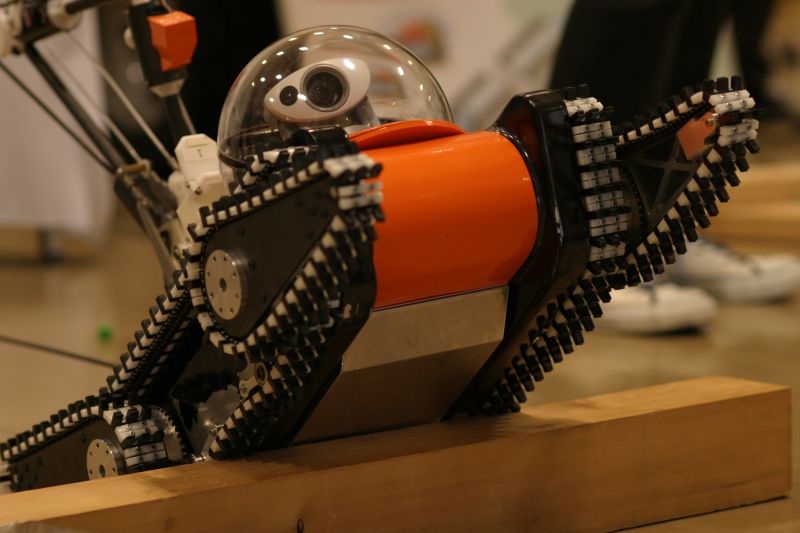
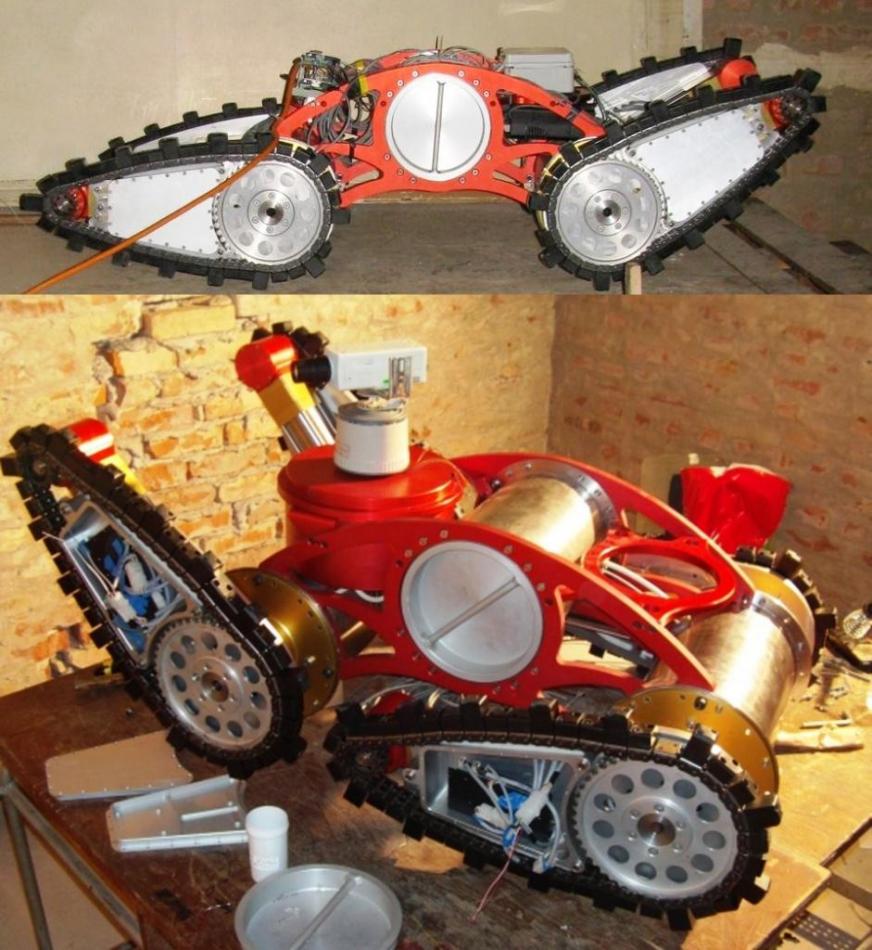
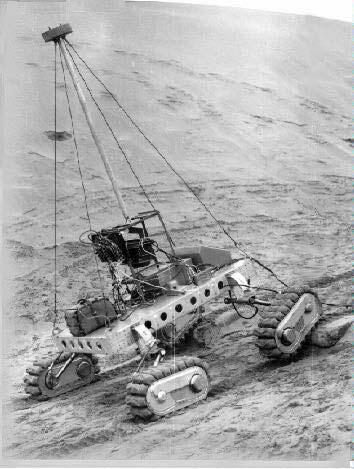
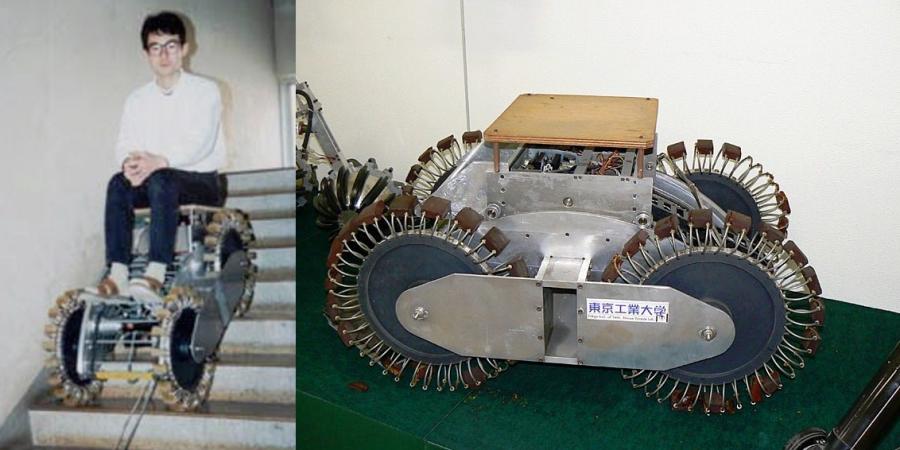
Rosa Robot, 1999 to 2002 designed by University of Helsinki, Finland. Initially in 1992-1994 by Transmash VM Company, Russia. Image from Matti Anttila. http://autsys.tkk.fi/en/SpaceMaster/Projects http://www.masa.net/space/phd_thesis/Thesis_Anttila.pdf
|
 |
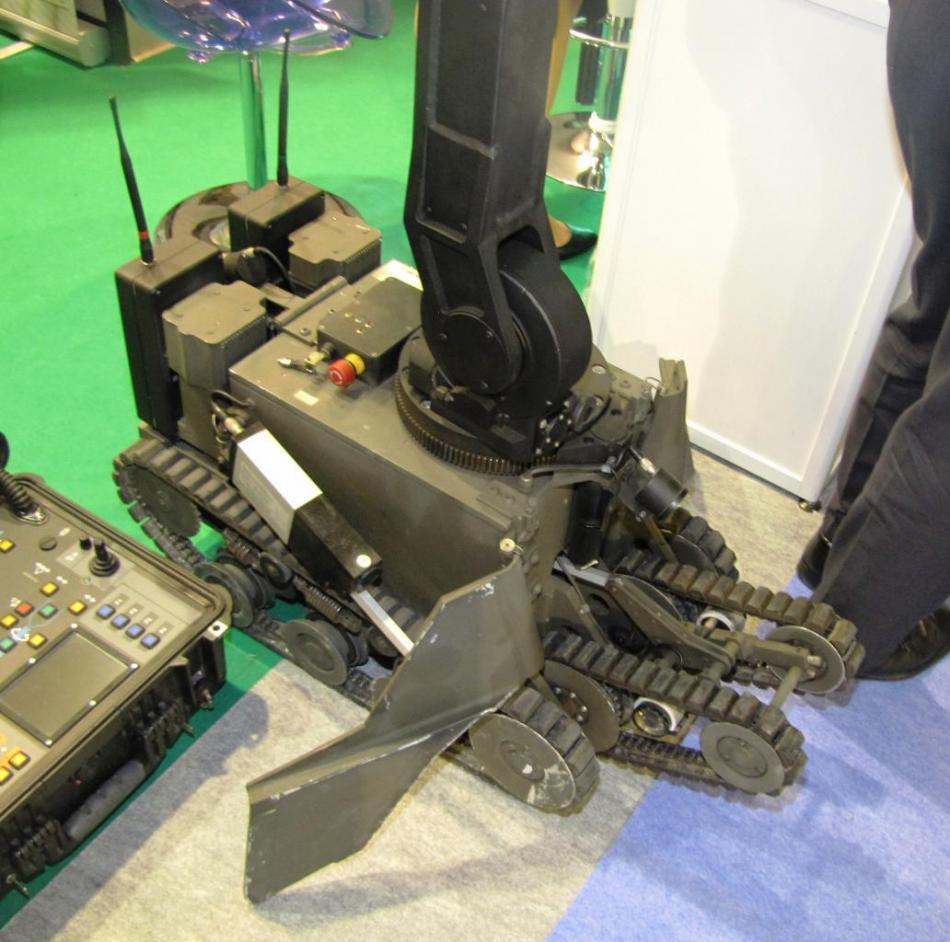
Cobham robot from Germany. Pict J M M at Villepinte, June 2012. |
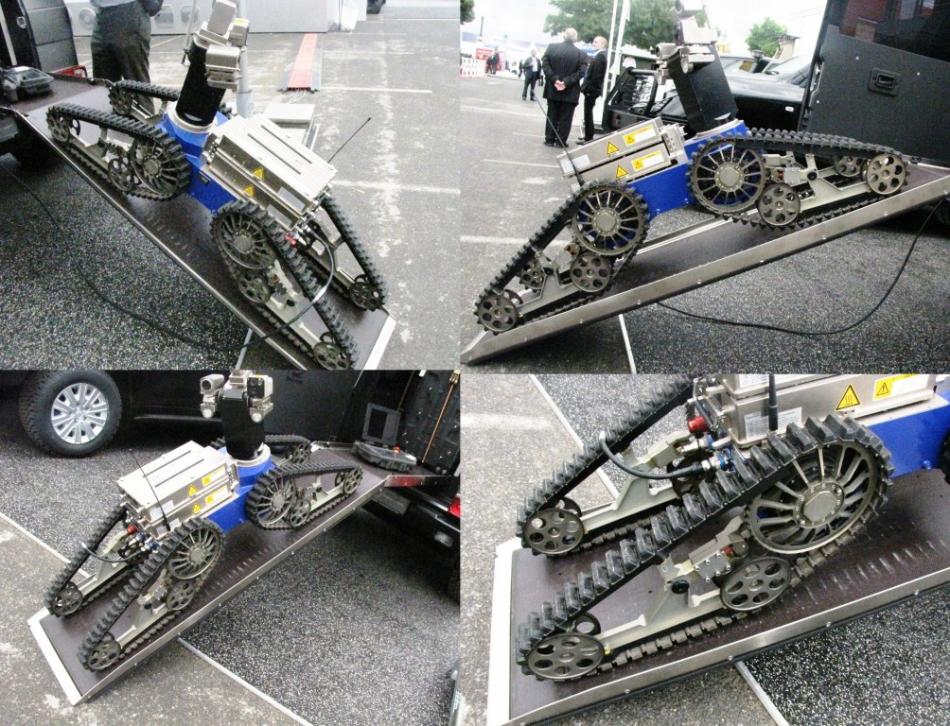 |
Cobham Robot, Germany. Pict J M M at Villepinte, June 2012. |
|
|
Telemax Robot of German Company Telerob in May 2010 at ELROB in Hammelburg, Germany.Telemax robot. From : www.monstersandcritics.com
|


 T
T
 |
Telemax Robot from Germany. Pict J M M at Villepinte, 2006 06. |
|
|
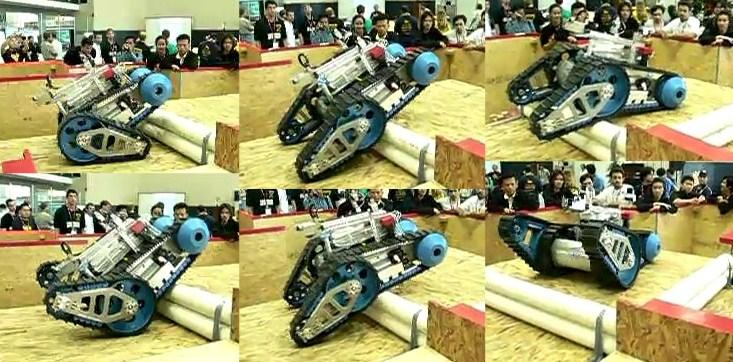
IUB Rugbot, of International University of Bremen was the winner of Robocup 2006. The kind of ladder with driven tracks was tilt. http://robotics.jacobs-university.de/RescueFieldTest2006/teams.htm
|

|
|
An "Eye Drive" ground robot of German Glueckauf Logistik Company during exhibition at the German army base on May 18, 2010 in Hammelburg, Germany. http://avaxnews.com/pictures/14041 |
|
|
Asendro, 2006 from Robowatch, group of Diehl BGT Defense GmbH & Co. http://www.elrob.org/melrob/melrob2006/information/teams-exhibitors/diehl.html
|

|
|
Tracked robots of the 2000. Top : Asendro Scout and bottom : Ofro, tracked robot for surveillance, both of Robowatch Technologies GmbH, Berlin. Pict J M M in 2008 at Villepinte.
|
|
|
Tracked robots of the 2000. Pictures J M M at Villepinte except upper center. From L to R and downwards : Telerob tEOD observation robot in 2006, from Telerob, Germany, OTO Melara TRP-1B, Italy, QineticIQbot CBRN surveillance robot in 2004, Telemax in 2006, OTO Melara TRP-1B in 2008, Scorpio in 2006. |


|
|
Qinetiq IQbot CBRN in 2004 from Qinetiq, Farnborough, GB.
|

|
|
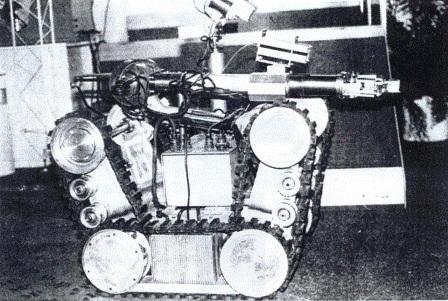
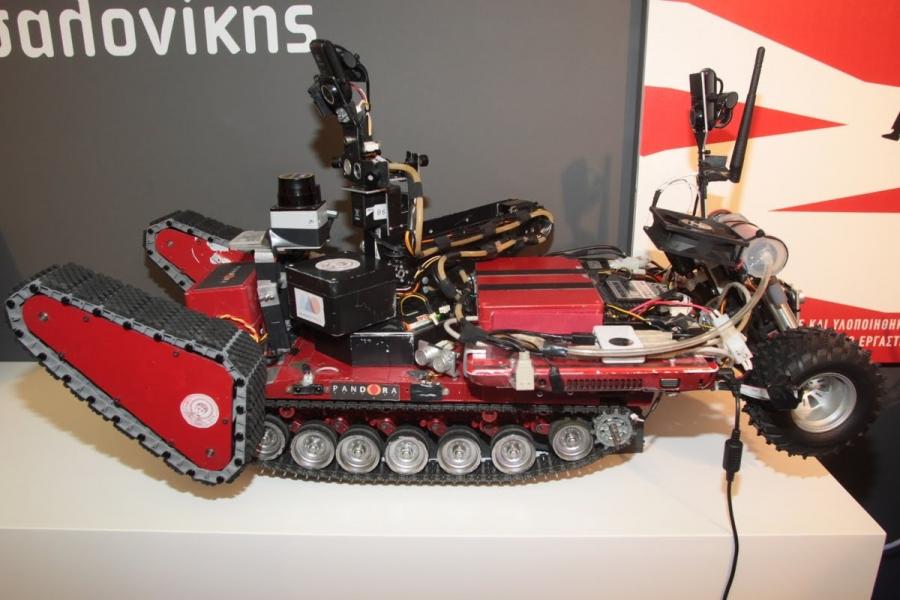
Soukos Rescue Robot, pictured by J M M in 2002 at Villepinte. Soukos Robots SA., Larisa, Greece, was founded in 1979. |

|
|
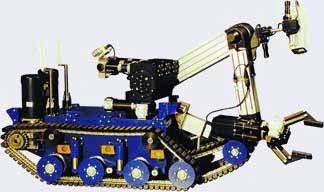
Oto Melara Robot TRP-1B. The front part of the tracks can be raised or lowered. Pict J M M at Villepinte, 2002. |

 |
Saturn robot, 2008, of Stellar Research Services from Southampton for urban reconnaissance contest.from http://www.wired.com/dangerroom/2008/08/british-robot-s/ |
 |
Saturn Unmaned Ground Vehicle of Stella Team, 2008. It won the MOD Grand Challenge in 2008. http://www.defpro.com/news/details/9738/print/ |
|
|
Groundhog Observation Robot with wheels and tracks. Pict J M M in 2004 at Villepinte. |

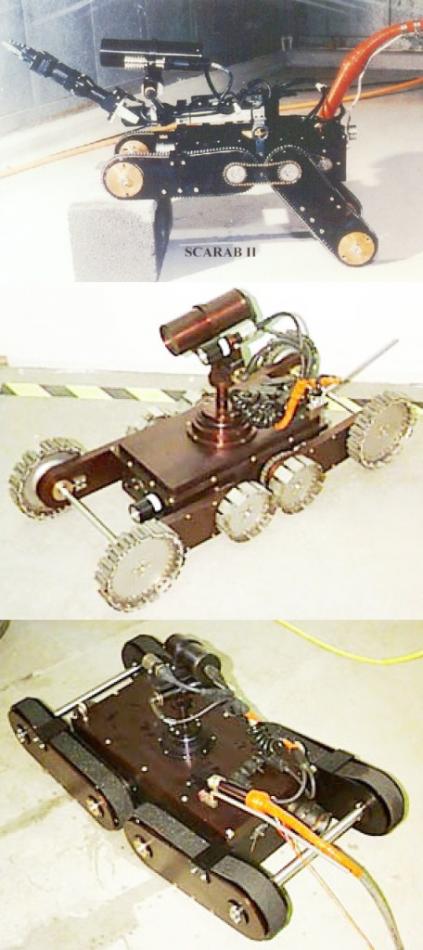 |
Scarab II and III of ROV Technologies, Inc, Vermont, built remote operated vehicles particularly for nuclear industry. http://www.rovtech.com/Vehicles/Index.html#Scarab_III |
 |
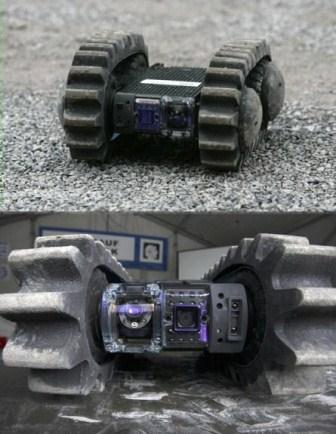
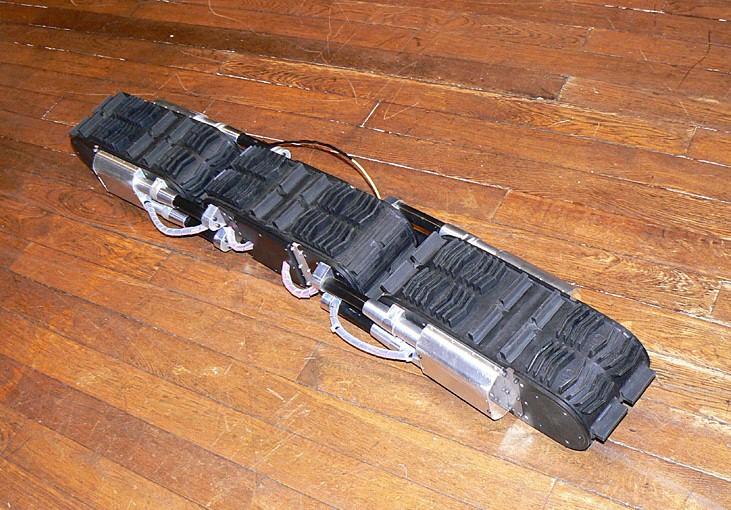
Micro VGTV, Variable Geometry Tracked Vehicle, from Inuktun. http://www.inuktun.com/crawler-vehicles/vgtv.html |
 |
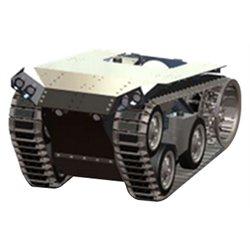
Chaos Robot from Autonomous Solutions, Utah.
|
|
|
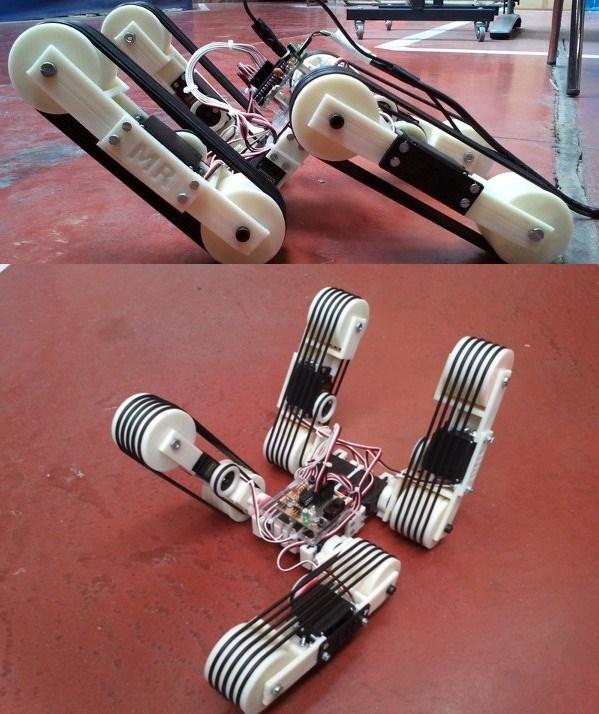
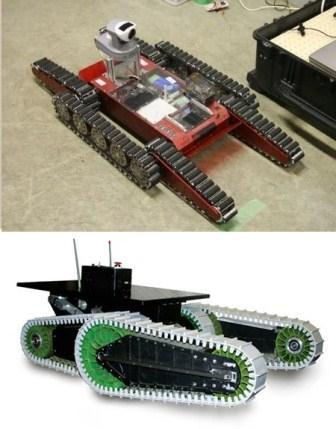
Chaos Robot since 2007 from Autonomous Solutions Inc., Mendon, UT, can carry loads of 25 kg. The four independent controlled tracks allow it to crawl or walk on uneven terrains. On this picture, Chaos robot is equipped with a manipulator. |

|
|
WATV tracked and walking robot from Autonomous Solutions, Mendon, Utah and University of Utah in the early 2000. The walking mode added mobility to tracks. This robot led to Chaos robot, of the same manufacturer, which is marketed since mid-2000. |

|
|
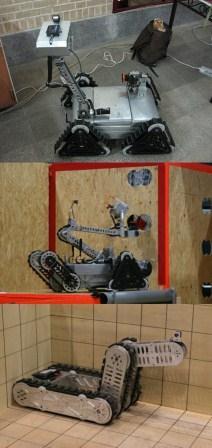
SRV-1 Howe and Howe underground rescue robot UGV. http://www.howeandhowe.com/gallery.php |
 |
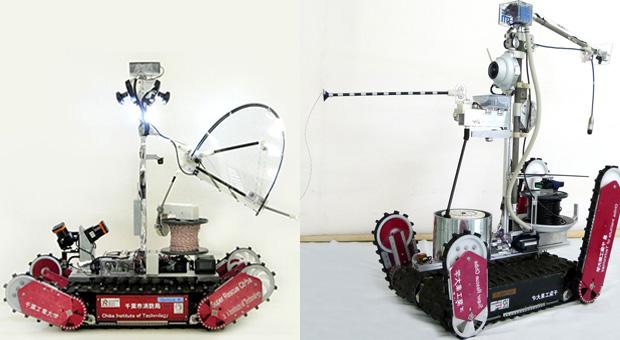
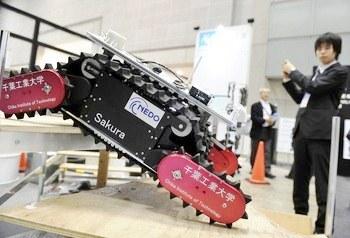
Moogle mini (13 kg) rescue robot of Chiba Institute of Technology. http://techcrunch.com/2010/11/01/video-mini-rescue-robot-moogle/ |
|
|
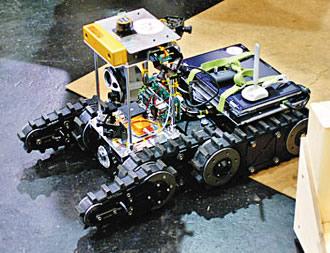
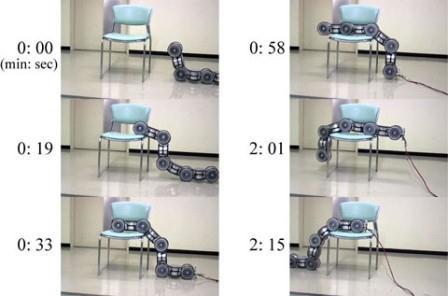
Hybrid Mobile Robot, 2008, University of Toronto. The manipulation arm was used for locomotion on uneven terrains. https://tspace.library.utoronto.ca/bitstream/1807/11181/1/Ben-Tzvi_Pinhas_200806_PhD_thesis.pdf |

|
|
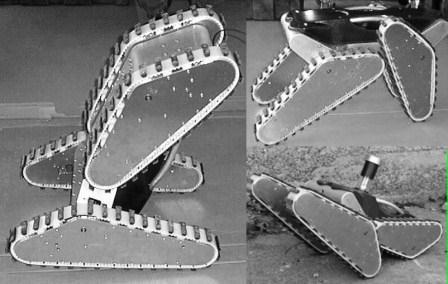
Good Samaritan Rescue Robot in 2006-2007 of Colorado State University, Denver. Ground clearance is variable by deforming the shape of tracks. http://www.today-archive.colostate.edu/index.asp?url=display_story&story_id=1001034 |

 |
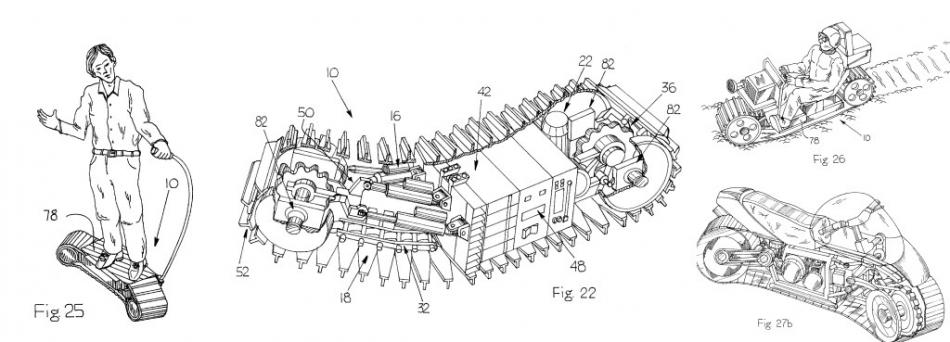
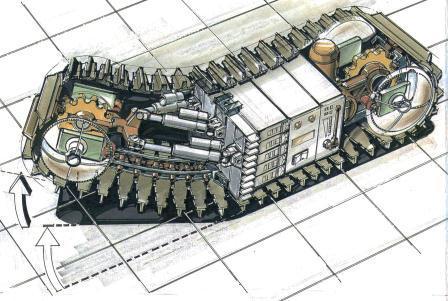
VGTV Variable Geometry Tracked Vehicle from Inutkun, Nanaimo, BC. By changing its shape, it can overcome obstacles. Built for nuclear inspection and search and rescue since the 2000s. the Linkage Mechanism Actuator, LMA robots presents the same system of reconfigurable tracks. http://www.inuktun.com/crawler-vehicles/vgtv.html |
|
|
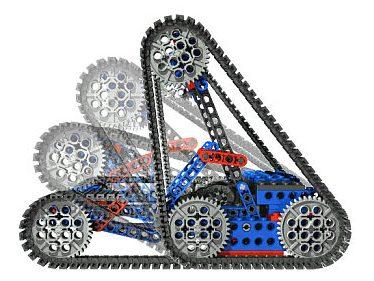
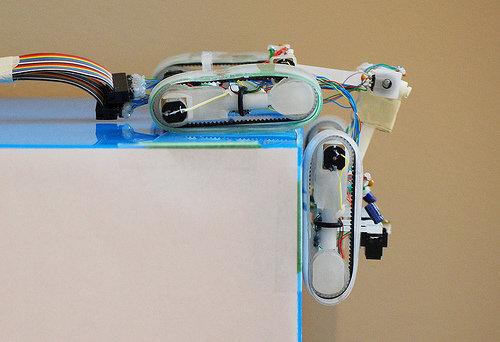
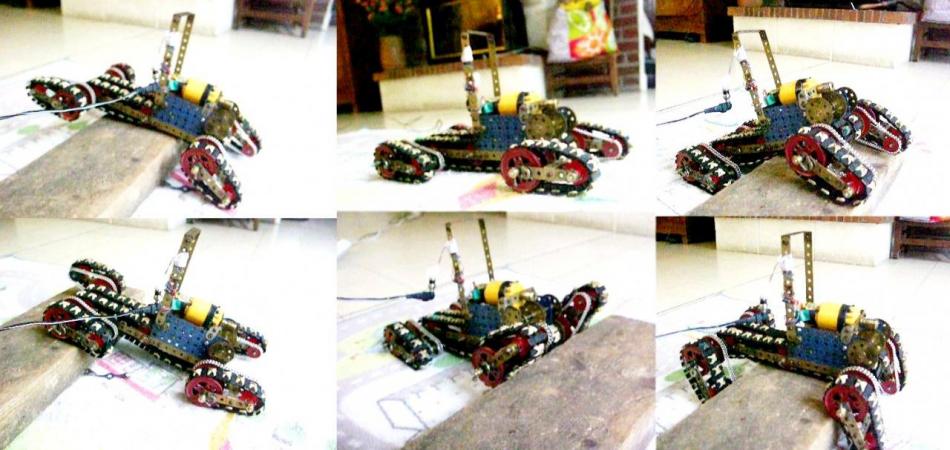
BSCP Bississipi Shape Changing Platform Robot built in Lego. It represents a functional model of the VGTV, Variable Geometry Tracked Vehicle Robot of Inutkun, Nanaimo, BC. http://www.brickshelf.com/cgi-bin/gallery.cgi?f=70974 |
|
|
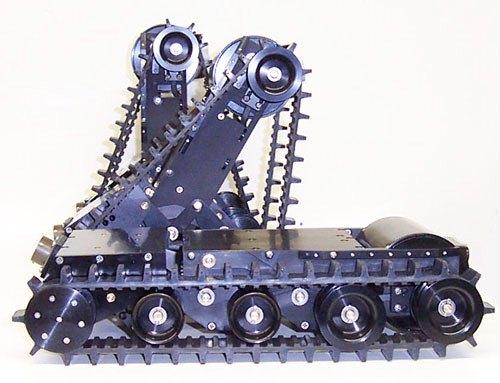
Bear Robot of Vecna Robotics, Greenbelt, MD, articulated tracked robots studied since 1999 for logistics, handling, surveillance, search and rescue, security, mine inspection. Powerful robot controlled by hydraulics, very mobile thanks 2 sets of tracks which can walk, and dynamic balancing.http://www.vecna.com/robotics/solutions/bear/index.shtml |

|
|
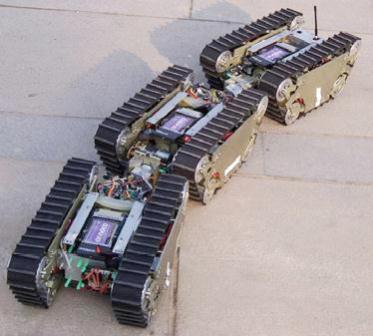
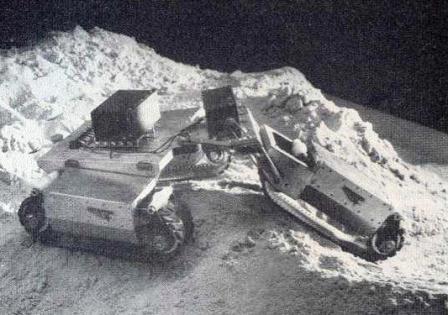
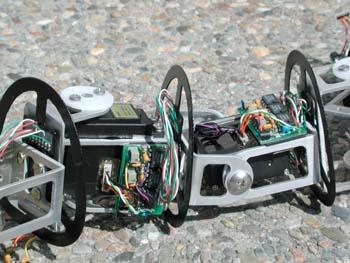
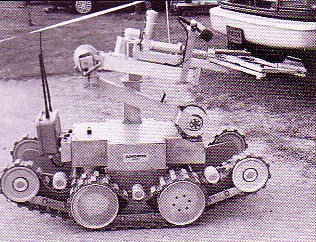
Sandia Rovers Ratler, articulated in the direction of the length, 4x4 for planetary exploration. http://www.flickr.com/photos/sandialabs/sets/72157622796257039/ |

 |
LURCH of Sandia robot articulated on the length. It may be with or without tracks (Ratler). http://robotics.sandia.gov/fuelcellrat.html |
  |
SandDragon, articulated in pitch, of Sandia National Laboratories, Livermore, CA. Powered by batteries for 5 hours endurance, it was built for Marine Corps. http://robotics.sandia.gov/sanddragon.html
Sandia National Laboratories Gemini-Scout rescue robot, 2011, is articulated in pitch and roll, skid steering. http://www.popsci.com/technology/article/2011-08/sandias-gemini-scout-rescue-robot-optimized-mining-disasters
|


























































































































 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa
{kind=link}