245 WALKING, HOPPING, SPHERICAL, WSL ROBOTS AND VEHICLES 5
 |
Robot Spider MX-Phoenix Hexapod designed in Zenta Robotic Creations. The device was designed to maneuver in tough terrain. https://www.fusecrunch.com/mx-phoenix-hexapod-robot.html, https://www.youtube.com/watch?v=woTsOPswUBU |
 |
Criket robot of 4Front Robotics from University of Calgary. Tracked and waking, it can be used for recuing in buildings, mines or pipes. https://www.4frontrobotics.com/ugvs, https://arxiv.org/ftp/arxiv/papers/1905/1905.04235.pdf,http://www.versicore.com/past-projects/cricket |
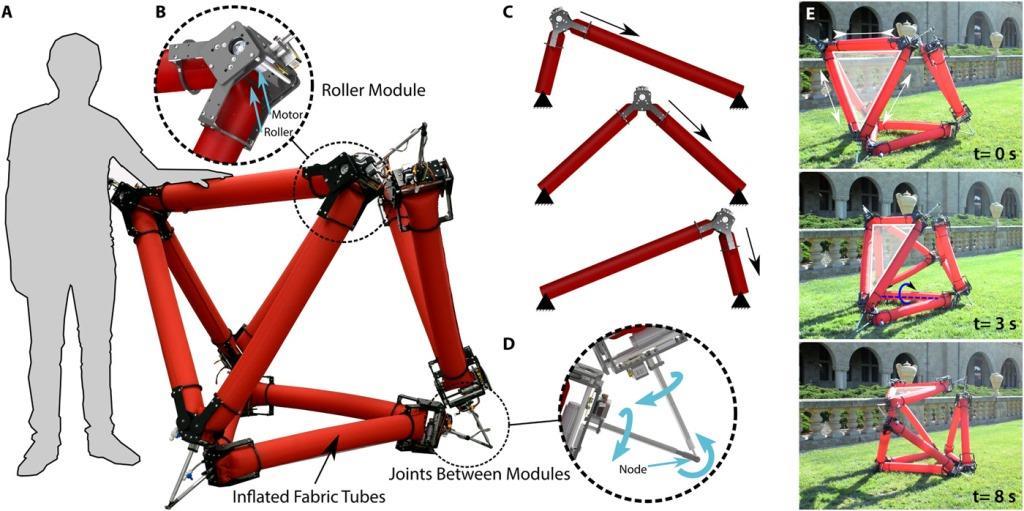 |
Crawling and transforming soft robot from Stanford University. This inflatable robot, a kind of walking track, can roll and move thanks electric motors by shape changing, by lengthening or tightening its soft tubes, all without connection to the outside (electrical outlet or compressed air). By combining several of these robots, we could make a useful structure for transport to disaster areas. Information provided by Vjekoslav Banic. https://newatlas.com/robotics/shape-changing-human-scale-free-roaming-inflatable-soft-robot/, https://www.youtube.com/watch?time_continue=129&v=XqgbLb8m77U&feature=emb_logo |
 |
ANYmal Robot from ETH Zurich, 2020, wheeled and legged. Information of Vjekoslav Banic. https://newatlas.com/robotics/anymal-quadruped-robot-wheels/, https://www.youtube.com/watch?v=_rPvKlvyw2w&feature=emb_logo, https://rsl.ethz.ch/robots-media/anymal-wheels.html |
 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa