72 WALKING, HOPPING, SPHERICAL, WSL ROBOTS AND VEHICLES 2
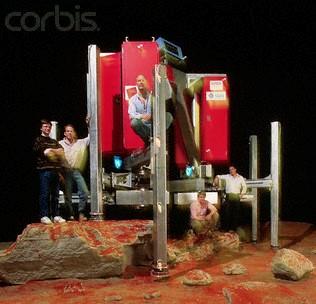 |
Ambler walking robot, 1988-91, of J Bares & W 'Red' Whittaker of Carnegie Mellon University and Jet Propulsion Laboratory. It a large robot of 2500 kg able to walk slowly on rocks. http://cyberneticzoo.com/walking-machines/1988-91-ambler-john-bares-william-red-whittaker-american/ |
 |
Comet III robot, 2002, from Prof. Kenzo Nonami of Chiba University, Japan, and used for detecting mines. Electric powered, it was driven by hydraulic legs. A crawler is added and it weighs 900 kg. http://photos1.blogger.com/img/93/1072/640/DSC_0032.jpg |
 |
Comet IV Robot, 2005-2011, from Nanomi Laboratory, Japan, driven by 6 hydraulic legs powered by 2 gasoline engines. It is intended to be 'all terrain' and can go up a 60cm step or slopes. Nevertheless, it is very slow. http://mec2.tm.chiba-u.jp/~nonami/english/research/comet/home.html |
 |
Iron Mule Train, 1961, drawing by Frank Tinsley. http://cyberneticzoo.com/walking-machines/1961-iron-mule-train-concept-frank-tinsley-american/ |
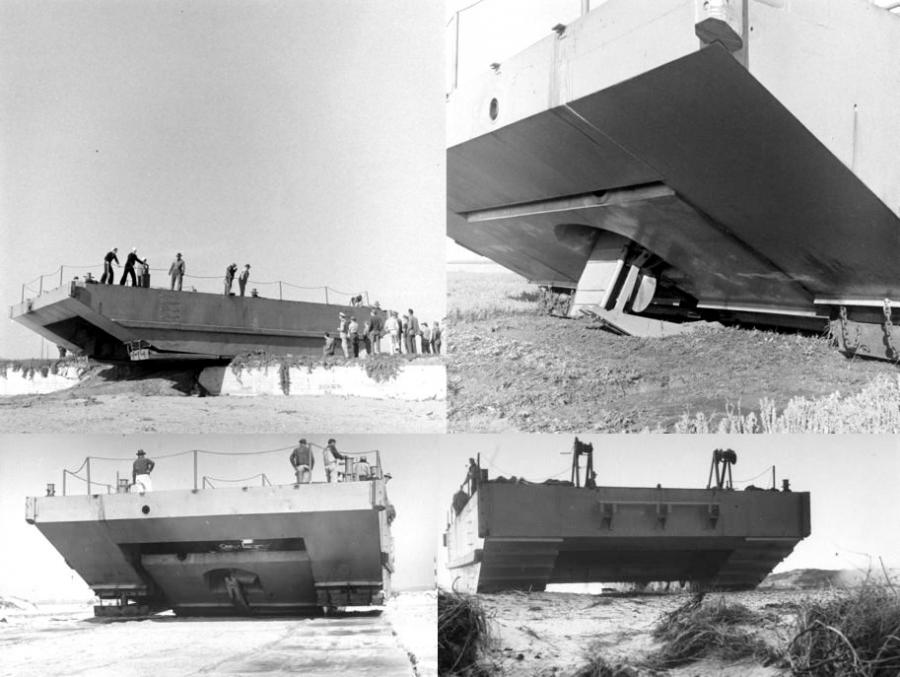 |
John T Tucker Amphibian Barge, walking vehicle, 1947. http://cyberneticzoo.com/walking-machines/1947-walking-amphibious-barge-john-t-tucker-american/ |
 |
Jumping Sumo Parrot Mini-Drone is on sales for 140 €. This drone jumps over obstacles thanks to springs and is really off-road. Parrot, based in Paris, was created in 1994 by 3 associates whose Henri Seydoux of the well-known family owning Schlumberger Limited, company of oil industry and Compagnie Générale de Géophysique, CGG. About 650 people work in Parrot. http://www.parrot.com/fr/produits/minidrones/; https://www.youtube.com/watch?v=-_8MtJ6WujI |
 |
R-Crank robot to be used by a 4 wheels skid steering vehicle. The principle is the same as a walking dragline. Research by HiBot of Hirose and Suzumori Lab, Tokyo Institute of Technology. http://www-robot.mes.titech.ac.jp/research.html;https://www.facebook.com/HiBotCo/photos/a.140913409280836.15507.140910195947824/659614540744051/?type=3&theater |
 |
Walking robot at JAXA exhibition. https://www.youtube.com/watch?v=BoR5HHLnVkE |
 |
Walking robot at JAXA exhibition in Nakatajima Sand Dunes in Hamamatsu in 2012. This robot has 4 'legs' turning on wheels like those of a dragline. HiBot Co built an R-Crank on the same principle. https://www.youtube.com/watch?v=02wuzYn2NSE;https://www.youtube.com/watch?v=BoR5HHLnVkE; https://www.youtube.com/watch?v=bxvM3_fzzL0 |
 |
Russian biped lunar walking-explorer prototype. http://cyberneticzoo.com/tag/soviet/page/4/ |
 |
Soviet Walking Wheel, 1983 by Vladimir Ischein. http://cyberneticzoo.com/category/walking-machines; http://cyberneticzoo.com/walking-machines/1983-soviet-walking-wheel; http://www.unusuallocomotion.com/pages/locomotion/the-wheel-reinvented.html |
 |
Walking boat of Andrew Baldwin, 2010, from GB. Designed to get out water. http://cyberneticzoo.com/walking-machines/2010-walking-boat-andrew-baldwin-british/ |
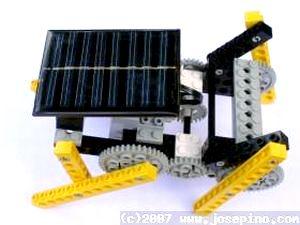 |
Walking Robot in Lego with four legs and solar powered, 2007. It is all-terrain. http://robologic-ircsh.blogspot.fr/2010/03/solar-powered-robot-different-endeavor.html; https://www.youtube.com/watch?v=P0u5gp0EQWI |
 |
Walking Tank of Shigley, 1957-60 drawing of Popular Sciences. http://cyberneticzoo.com/walking-machines/1957-60-walking-machines-joseph-shigley-american/; http://cyberneticzoo.com/wp-content/uploads/2010/04/Tanks-that-Walk-and-Jump-PopSci-Jul1960.pdf; http://cyberneticzoo.com/wp-content/uploads/2010/04/Shigley-Mech-of-walk-veh-1960.pdf |
 |
Walking vehicle from designer Javier Gutierrez. http://www.coroflot.com/javierengineer/portfolio; https://vimeo.com/tag:javieringenieria.es |
 |
Walking robot, Japan Robotech, Kokushikan University and the Waseda University. http://www.damngeeky.com/2013/08/30/13696/smartphone-controlled-solar-powered-robot-walks-like-an-animal-even-with-wheels.html https://www.youtube.com/watch?v=DmEV_-oTZpo |
 |
Wheel Leg Peopler II, 2010, hybrid walking and rolling robot of Tokuji OKADA Niigata University, Japan. http://rraj.rsj-web.org/en_atcl/936. http://rraj.rsj-web.org/back_wp/wp-content/uploads/b533dc6f6c7aaf0add03045bf8b3399a.pdf |
 |
Wheel Walker of Ralph Mosher, USA, 1973. Wheels are used as legs to overcome obstacles making of the vehicle a walking machine. Picture from the site of Reuben Hoggett : http://cyberneticzoo.com/category/walking-machines/page/2/ |
 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa