 |
ACM-R8 snake robot from HiBot for surveying disaster sites. From Tokyo Institute of Technology by Suzumori Lab. https://www.youtube.com/watch?v=ykcq1fpY8AU; http://www-robot.mes.titech.ac.jp/research.html
|
 |
Argo J5, tracked ground vehicle marketed by Ontario Drive & Gear Limited, Ontario, fills the gap between a recreational quad and off road heavy equipment. Skid-steering, electric motor. http://www.unmannedsystemssource.com/shop/argo-j5-ground-vehicle/; https://www.youtube.comwatch?v=VD2h_zxk2xA#t=21; https://www.youtube.com/watch?v=QErKWALmfCk; https://www.youtube.com/watch?v=AZwmFvAuaKY
|
 |
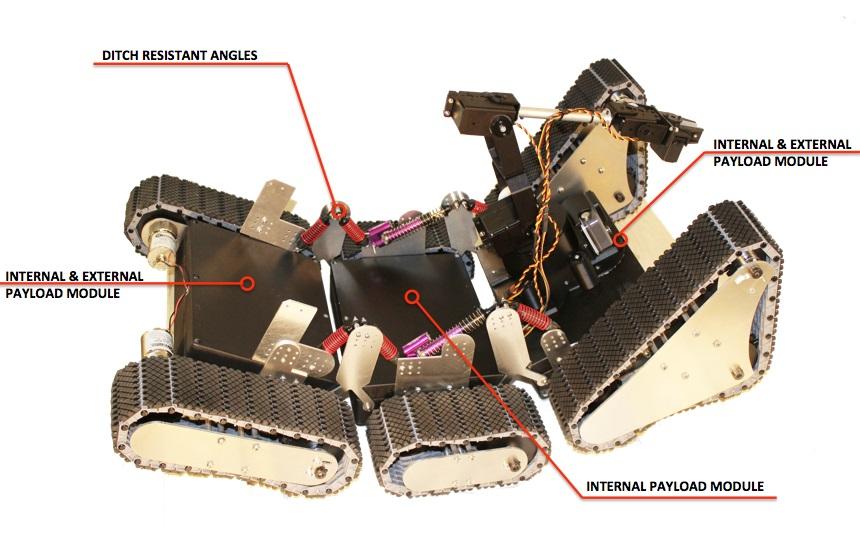
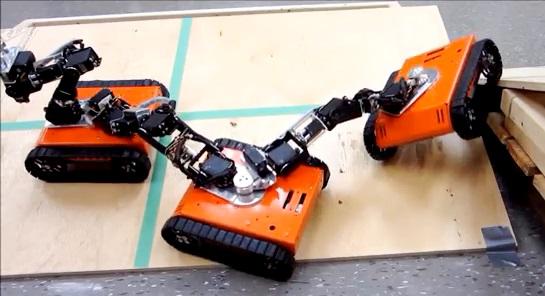
Arti robot of Transcend Robotics, Arlington, 2014. Articulated robot in 3 parts, very mobile, called also ground drone. A non-active pitch control by springs is fitted between the parts. http://transcendrobotics.com/; https://www.youtube.com/watch?v=OkYJmAdJSZc; http://diydrones.com/profiles/blogs/stair-climbing-ground-drone-arti-by-transcend-robotics; http://vimeo.com/106556533; http://vastila.com/transcend-robotics-arti-ground-drone-stair-climbing-tracked-robot/
|
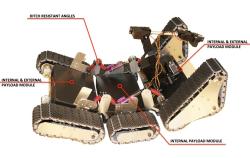 |
Arti robot. http://transcendrobotics.com/
|
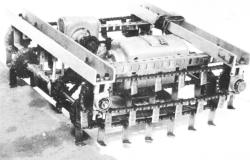 |
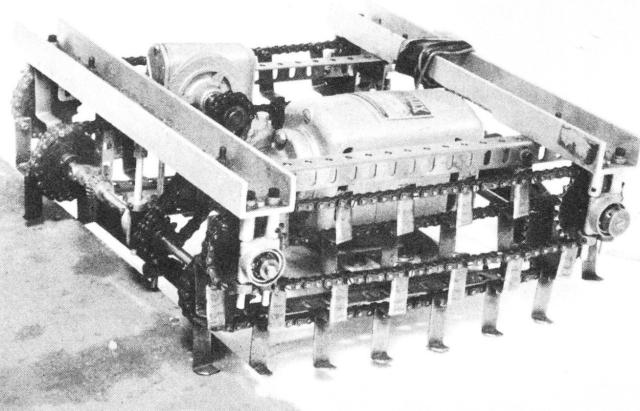
Centipede, 1967, of Meredith W. Thring. Each leg, stated to chains moved vertically. From Ruben Hoggett : http://cyberneticzoo.com/tag/meredith-thring/
|
 |
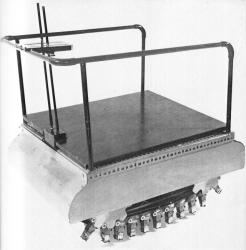
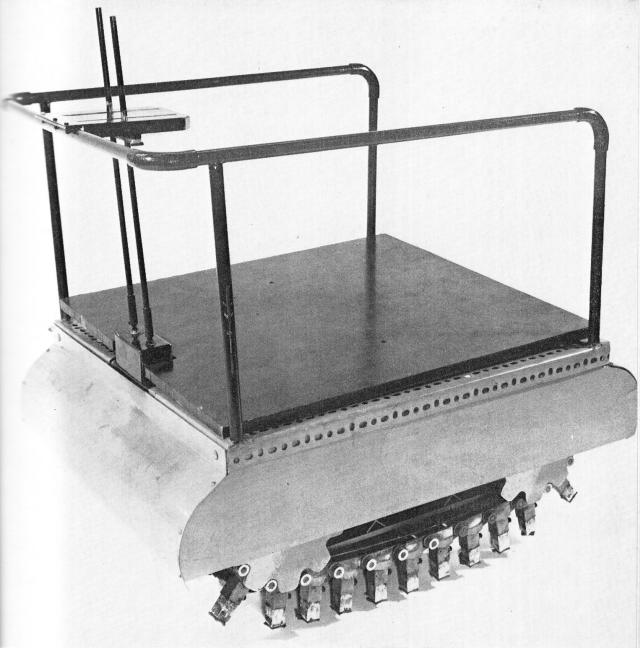
Second prototype of Centipede of Meredith Thring, in the 60s. Each leg is separately sprung and can have various types of feet. From Ruben Hoggett : http://cyberneticzoo.com/tag/meredith-thring/
|
 |
Small Scale working model of Mechanical Elephant of Meredith W. Thring. Each leg was individually sprung, giving the machine a capability of climbing vertical objects. From Ruben Hoggett : http://cyberneticzoo.com/tag/meredith-thring/
|
 |
D-Track printable robot. http://www.thingiverse.com/thing:13298; http://www.youtube.com/watch?v=GeIoDcqjSoo
|
 |
Foxiris robot for use by Total for petroleum industries. http://www.argos-challenge.com/fr/content/actualit%C3%A9s-foxiris
|
 |
HiBot new snake-like inspection robot. https://www.facebook.com/HiBotCo/photos/a.140913409280836.15507.140910195947824/606307969408042/?type=3&theater
|
 |
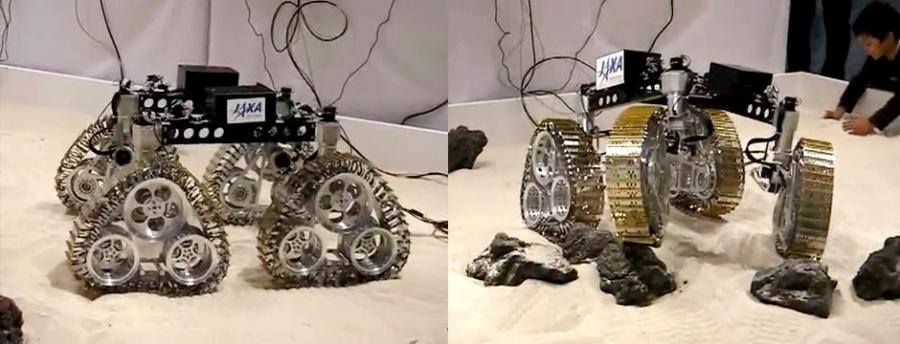
JAXA Lunar Rover Test run model. https://www.youtube.com/watch?v=5h6R__chycA
|
 |
Juno Tracked Rover of Canadian Space Agency. http://www.asc-csa.gc.ca/eng/rovers/juno.asp
|
 |
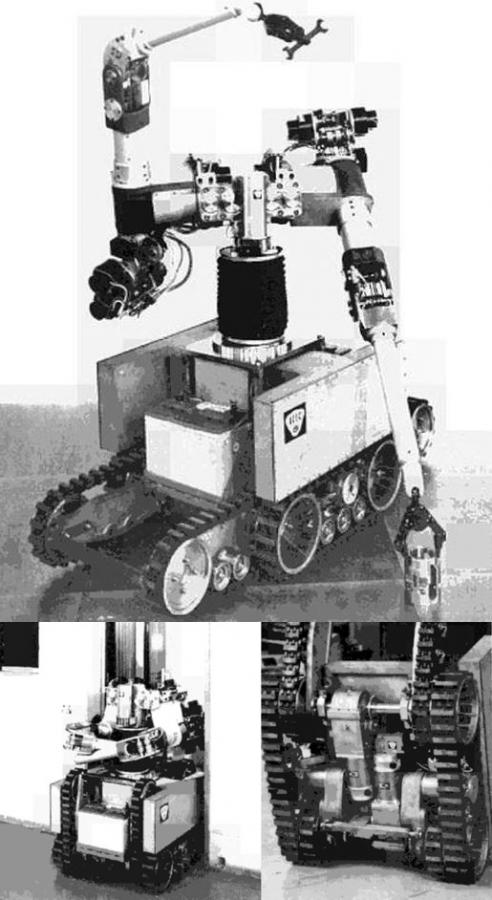
Soryu IV of HiBot snake like robot for search and rescue or remote inspection. HiBot Corp., a spin-off from Hirose and Fukushima Lab of the Tokyo Institute of Technology, and Topy Industries, Ltd. Hirose and Fukushima Lab. are well known for the research and development of rescue and mobile robots, while Topy Industries has acquired a great deal of knowledge over the years with the manufacture of virtually every sort of crawlers for construction machines. http://www.hibot.co.jp/en/products/robots_1/soryu-4_29  PDF Soryu iv robot (3.34 Mo) PDF Soryu iv robot (3.34 Mo)
|
 |
Soryu IV of HiBot snake like robot.
|
 |
Track Walker II of Tohoku University in Sendai, 2012, in Nakatajima Sand Dunes in Hamamatsu with JAXA, Japan Aerospace Exploration Agency. This robot is equipped with four tracks which can walk like a dragline. http://ajw.asahi.com/article/behind_news/social_affairs/AJ201203140056 https://www.youtube.com/watch?; https://thehopefulmonster.wordpress.com/page/2/v=nyGCG1YGXhA; https://www.youtube.com/watch?v=WaWv7CjACAU; https://www.youtube.com/watch?v=EIgv9YASFDQ
|
 |
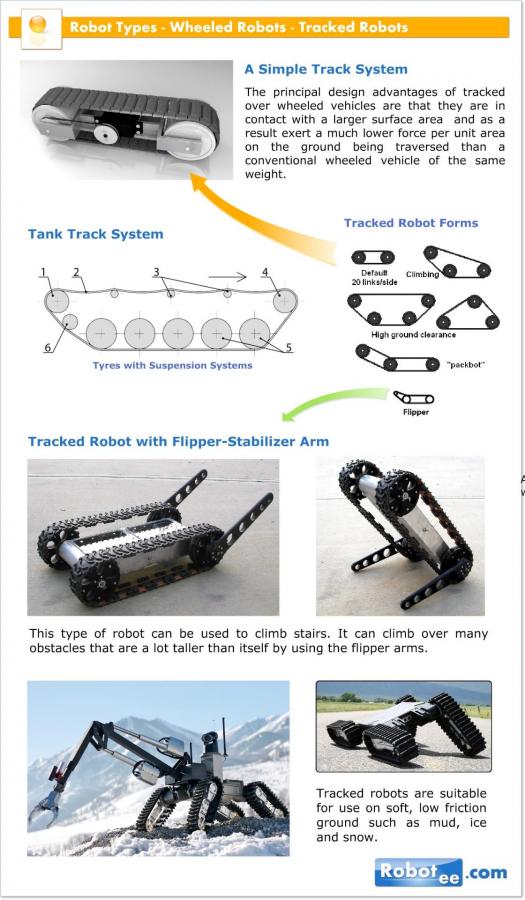
Tracked Robots http://www.robotee.com/index.php/all-types-of-robots/wheeled-robots/tracked-robots/
|
 |
R2TM3 rescue robot, 2012, completely built by Sean Phillips, University of Waterloo, Ontario. For this kind of robot, mobility is the first quality. Three or more tracked modules can be automatically linked together of unlinked. It looks like a snake robot which seems one of the best system to move over uneven terrains. https://www.youtube.com/watch?v=Fx4WEVWx5pQ&feature=youtu.be
|

















 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa