WALKING VEHICLES
The text is at the end of the chapter.
The site : http://cyberneticzoo.com/?page_id=164 is comprehensive.

Goat and ibex on steep slope : the ideal walking machine http://www.planete-rando.com/Ibex
http://toulaho.pagesperso-orange.fr/culmineurope/trig12.jpg
I - WALKING MACHINES BEFORE 1940
|
|
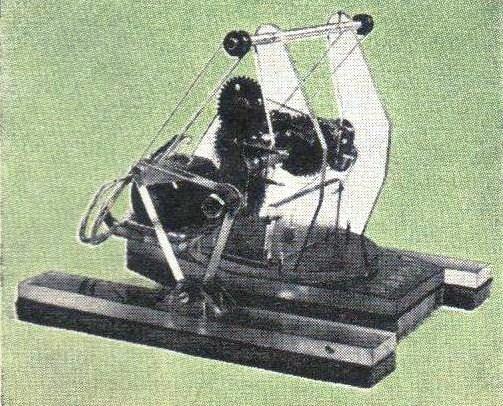
Centipede walking Machine of Meredith Thring, 1967, from Australia and England, walked by modification of wheels and chains. From http://cyberneticzoo.com/tag/meredith-thring/.
|
 |
Mavag-Fiat 'Mocher Wagen' with feet, 1923. Rear wheels were replaced by a 'feet propulsion'. It was a scale model made by brothers Haris who run the Haris Automuseum in Budapest, Hungary. Pict and text are from Wheels and Tracks N° 61 about 1998. The author saw also at Rétromobile in the mid 2000s another WWI period walking vehicle on a movie of the 1910s, but unfortunately unknown. |
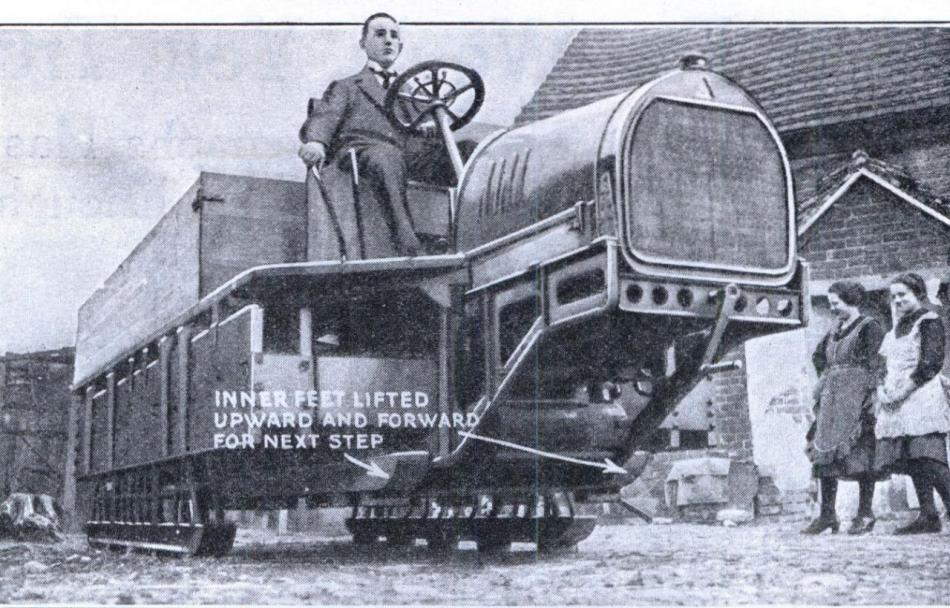 |
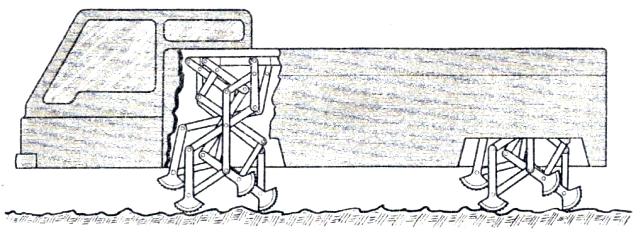
Walking Truck, 1923, from a German manufacturer. Each side had 2 sets of feet. When a set was raised and moved forwards, the other repeated the motion. From : http://blog.modernmechanix.com/2008/06/12/wheel-less-truck-walks-on-metal-feet/ |
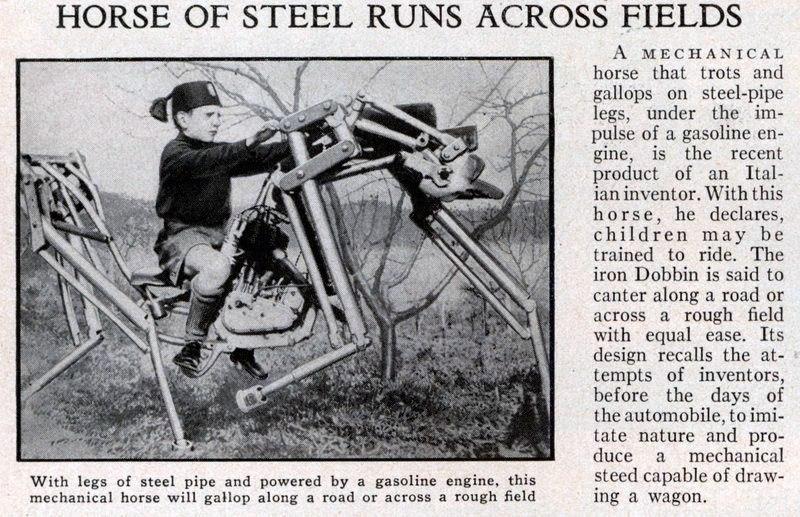 |
Alzetta's Mechanical Horse in Mechanix Illustrated, Apr 1933. Product of an Italian inventor, Alzetta, was said to run on road or off-road with equal ease. Many thinks show that it was not a true walking machine too complex for this time and was a hoax. http://gurneyjourney.blogspot.fr/2009/10/1933-walker-fact-or-fraud.html |

II ONE LEG ROBOT
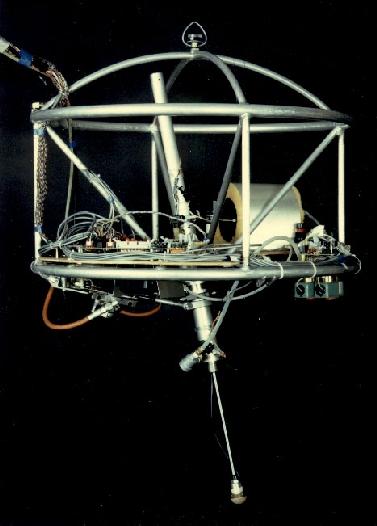 |
3D One-Leg Hopper 1983-84 of Massassuchetts Institute of Technology built this simplified robot, powered by hydraulics and the leg activated by compressed air. It carried sensors. Balance was achieved with a simple control system. http://www.ai.mit.edu/projects/leglab/robots/3D_hopper/3D_hopper.html |
II - TWO LEGS WALKING MACHINES
 |
Bipedal Walking Machine of the 70s, from Russia. |
 |
M2 2 legs robot of MIT, 1998 |
 |
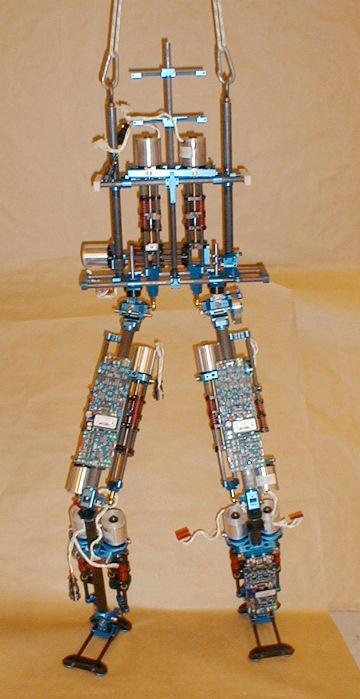
Planar Biped 1985-1990 of Massassuchetts Leg Laboratory, had 2 telescopic legs with a hydraulic actuator at each leg. The Planar Biped has been used to study locomotion on rough terrain, running at high speed, and gymnastic maneuvers. http://www.ai.mit.edu/projects/leglab/robots/2D_biped/2D_biped.html |
 |
Berkeley Walking Wheelbarrow, 2002, from University of Berkeley, California, as Human Assisted Walking Device. http://bleex.me.berkeley.edu/research/human-assisted-walking-machine/ |
 |
Runbot, 2 legs, 2006, developed by researchers from Germany and Scotland. It was the fastest robot on 2 legs. 30 cm high, it could walk at 3,5 leg-lengh per second. In this category was found the human robots. http://blog.makezine.com/category/news_from_the_future/page/41/ |
 |
Hardiman GE Exoskeleton, 1965-71, designed by Ralph Mosher. Mass 680 kg, lift capacity 680 kg, power 25 hp, Speed 0,6 m/s, This electro-hydraulic chassis fitted on to a human allowed it to lift big weights. It was one of the first exoskeleton; many have been built since this one. http://cyberneticzoo.com |
 |
Raytheon Sarcos exoskeleton XOS, at Salt Lake City, 2010. Walking, running, climbing, raising loads can be made easily by the Mechanical Squeleton, multiplying the power of humans. The suit is built from a combination of structures, sensors, actuators and controllers, and it is powered by high pressure hydraulics. Only 40 mn autonomy. http://www.nowhereelse.fr/exosquelette-xos-squelette-mcanique-de-combat-vidos-7942/ |
III - THREE LEGS WALKING MACHINES
|
|
|
 |
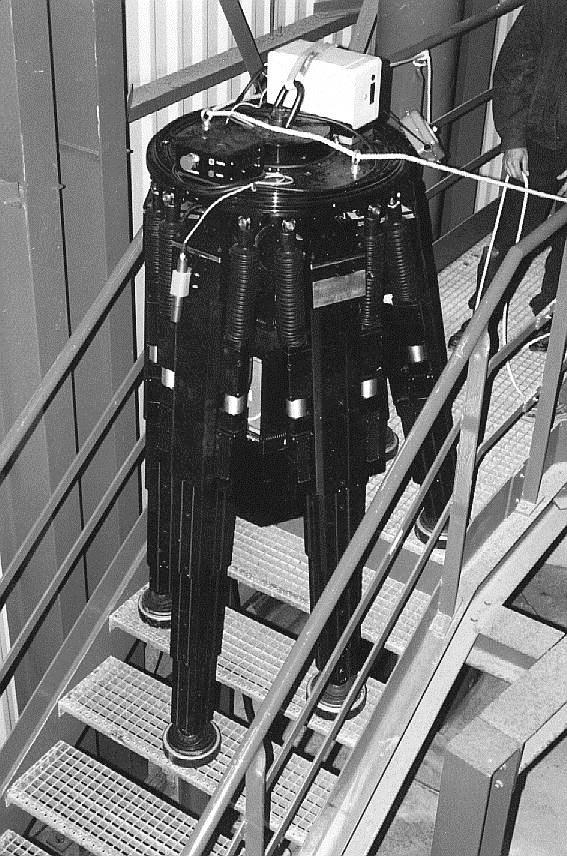
Strider, three legged robot of Romela, 2007, by Dennis Hong at Virginia Tech, Blacksburg. Strider means Self-excited Tripedal Dynamic Experimental Robot, simple and stable. 1 m high for use of cameras, STriDER uses the concept of "actuated passive dynamics" which means that the swing leg simply swings, between the two-legged stance, not actively controlled nor actuated. http://spectrum.ieee.org/automaton/robotics/robotics-software/this_three_legged_robot_walks_l#more |
|
|
|
 |
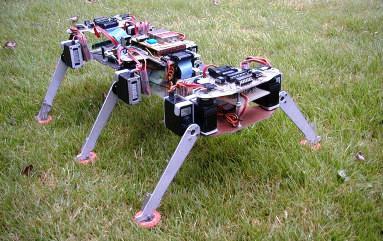
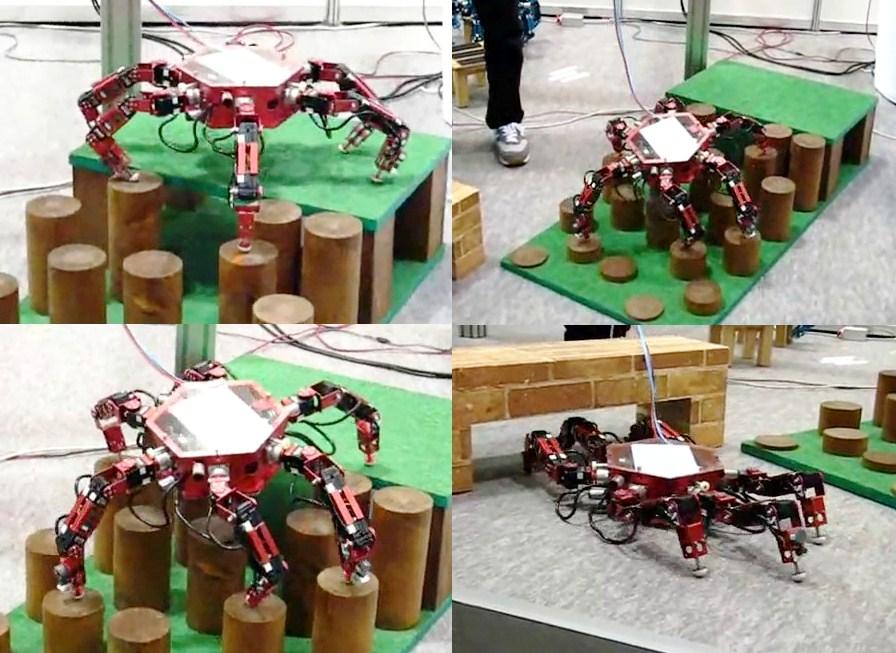
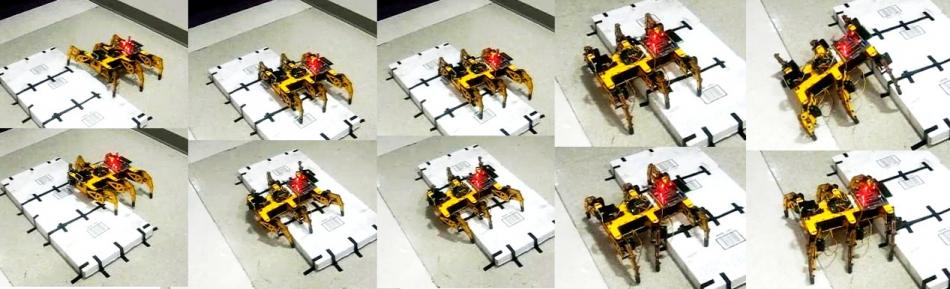
Three-legged robot of the University of Heidelberg in association with those of Mannheim and Zurich which seems to be, after analysis, well suited for running, skipping, climbing, excavating on uneven terrains. http://proaut.ziti.uni-heidelberg.de:8080/proaut/content/e74/e160/e197/index_eng.html |
IV - FOUR LEGS WALKING MACHINES
 |
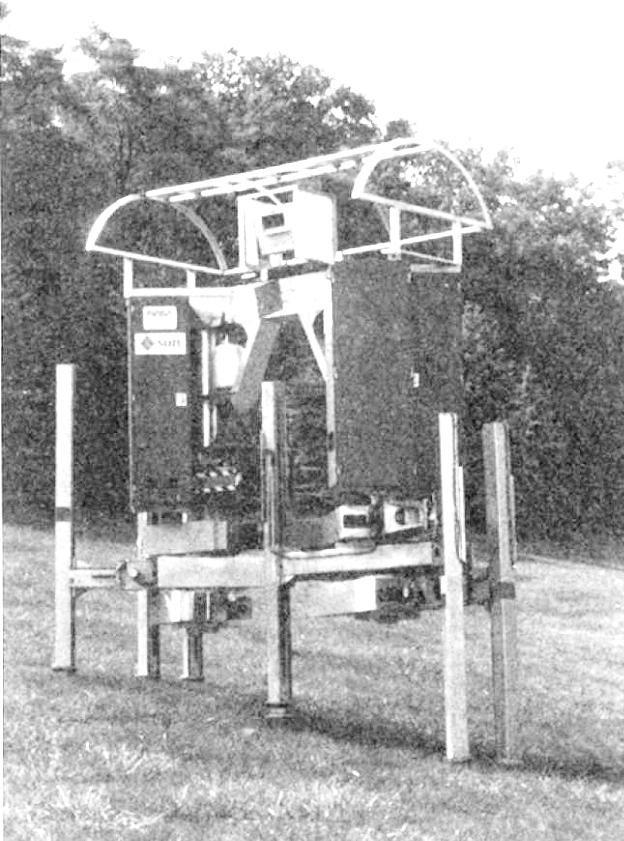
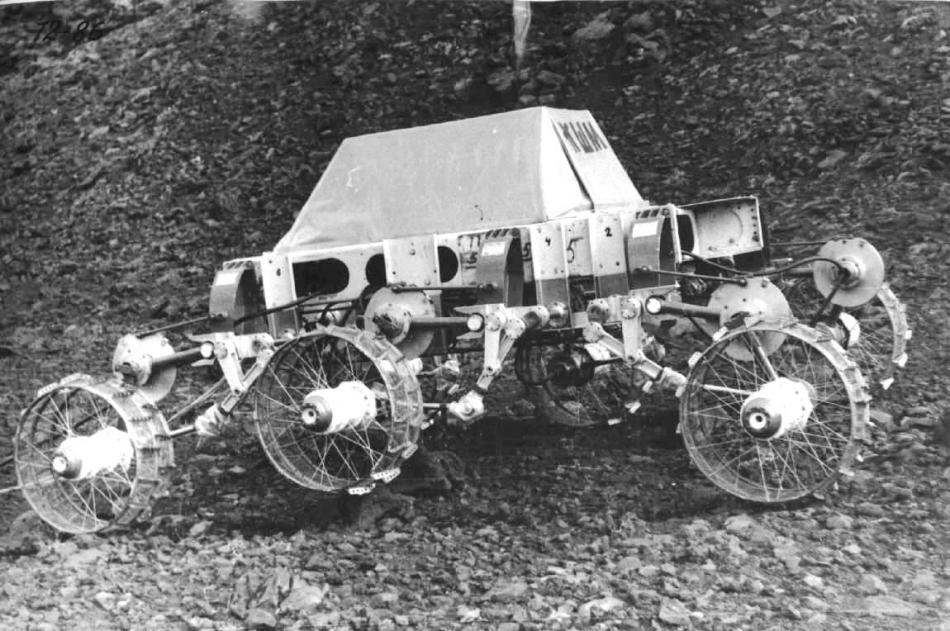
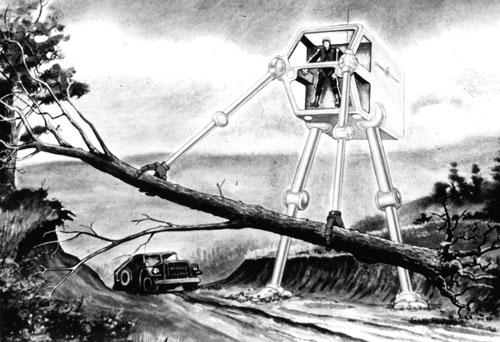
Moonwalker, 1966, Walking chair for disabled. This walking robot for Moon of Surveyor Program has been abandoned and replaced by this little 'Walker' for young disabled. Built by Space General, it was tested at the Medical Center of California, Los Angeles. Pict and text from Science et Vie, Sept 1968. See also : http://cyberneticzoo.com/?p=2616 |
 |
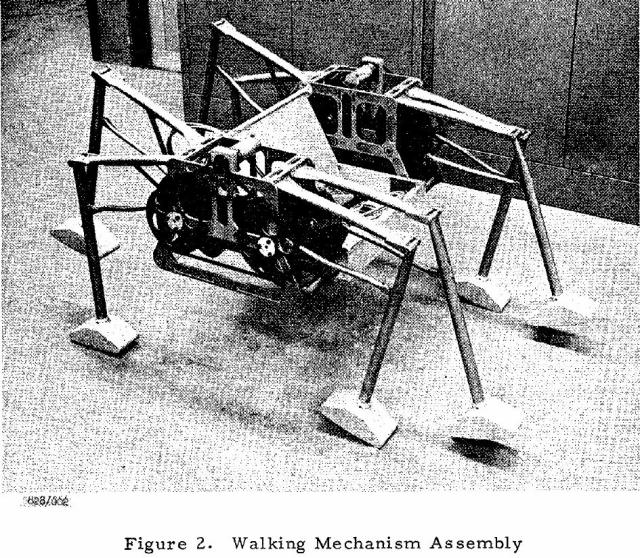
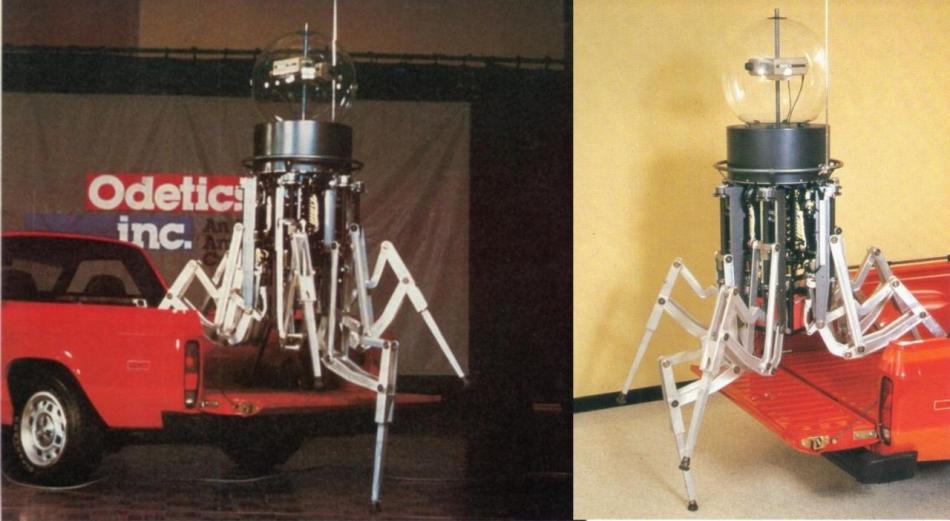
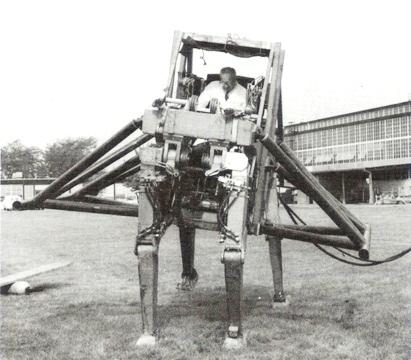
Phony Pony, 1968, by Frank and Mc Ghee, University of South Carolina, before existence of microprocessors, but with a computer. |
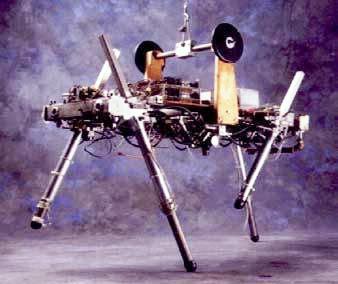 |
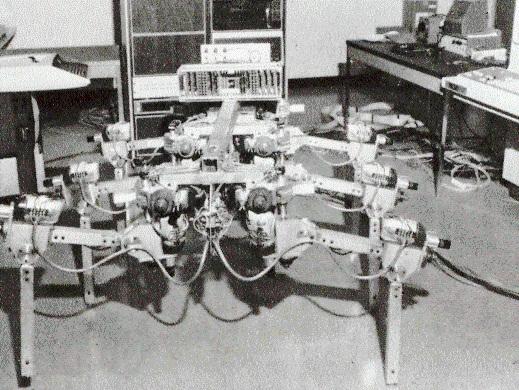
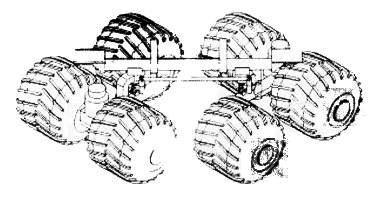
Raibert's Quadruped robot, 1985-87. By coupling the legs, the quadruped successfully executed trotting (diagonally paired legs), pacing (lateral pairs), bounding (front pair and rear pair) and several transitions between gaits. From Carl Reeves Thesis, Mc Gill University, Montréal, 2002.
|
 |
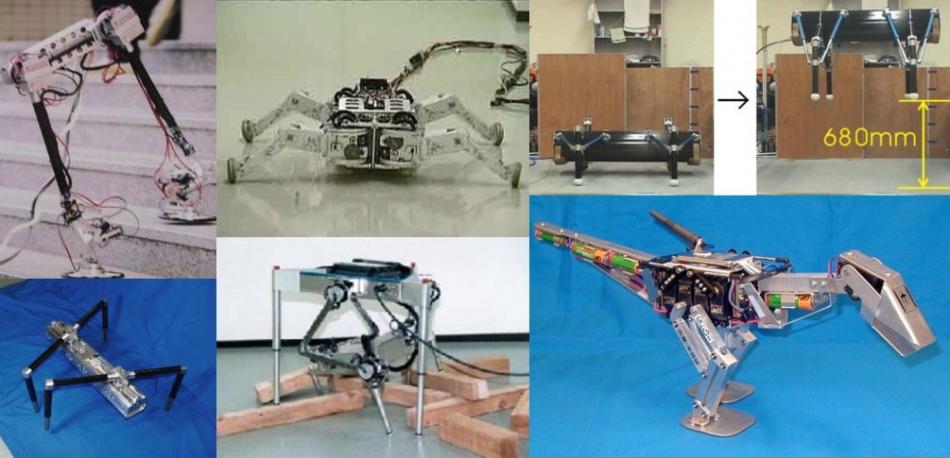
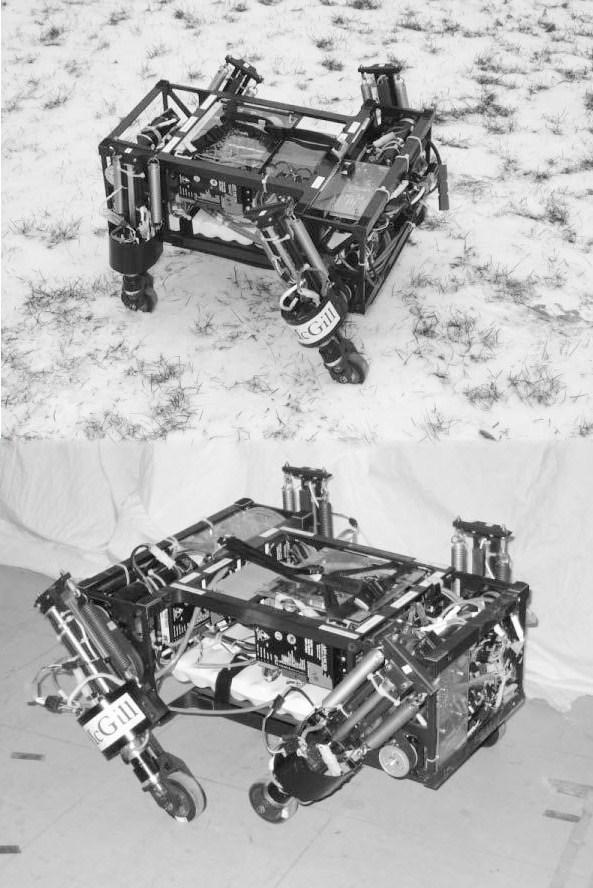
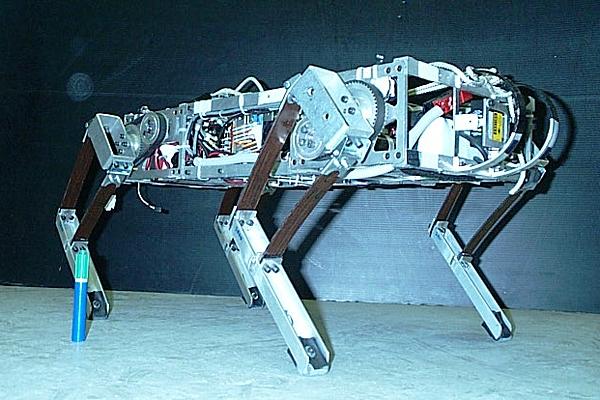
ARS Robots for Ambulatory Robotics Laboratory of Pr Martin Buehler created in 1991. It exploited elastic mechanical devices to reduce power consumption. They achieved dynamic walking, bounding, turning and step climbing. From L to R and U to D : ARL's Monopod II 1996, ARL's SCOUT I 1997, ARL's Scout II 1998, ARL's Scout II with passive knees 1999. From Thesis of Carl Reeves, Mc Gill University, Montréal, 2002. |
 |
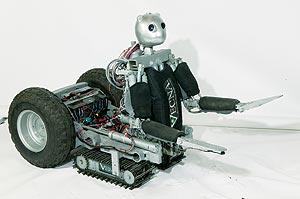
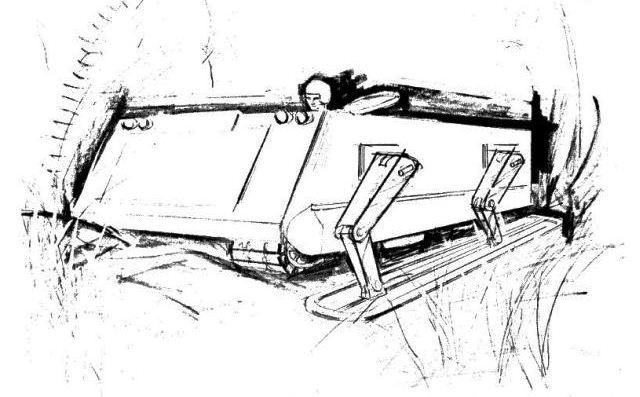
Road Runner, 1995, kind of legged moped of Yoshifumi Kaji presented at the Toyota Idea Olympics in Japan. It got a Silver Prize. Nevertheless, it was not at all off-road. Pict from Wheels and Tracks, N° 64 and http://cyberneticzoo.com/?p=5969 |
 |
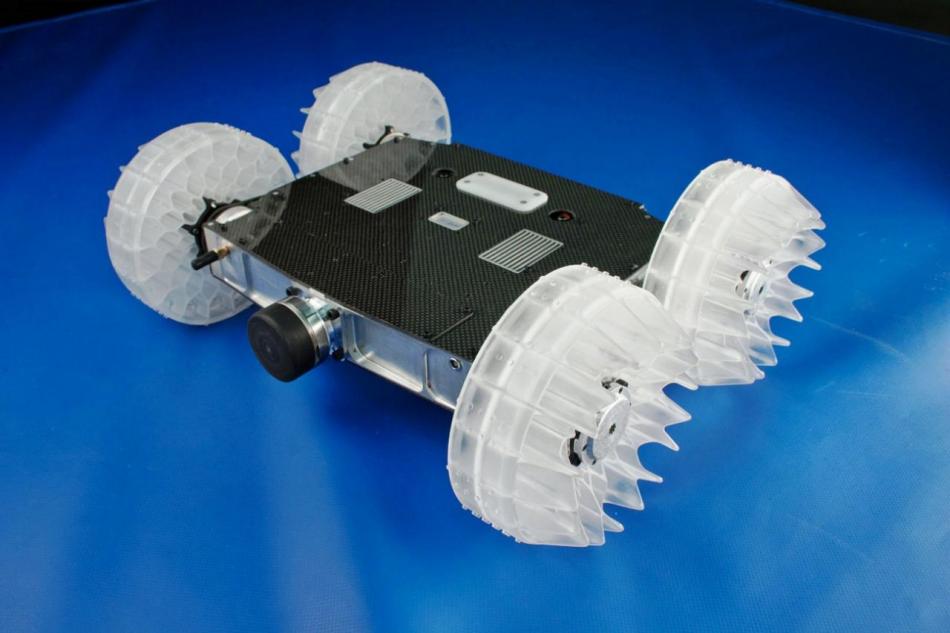
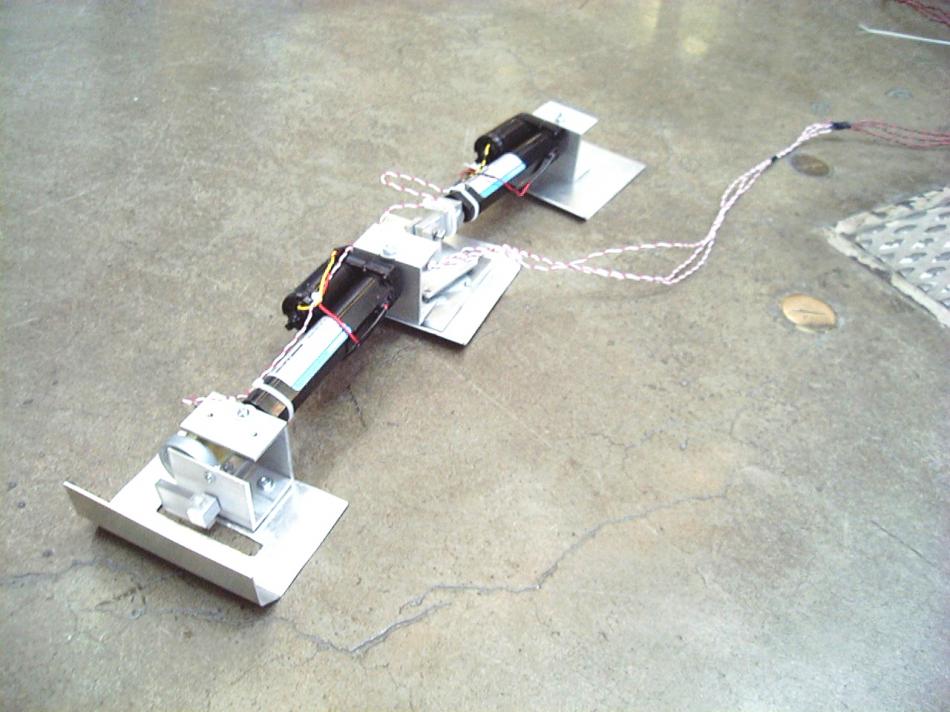
Walking Exploration robot of University of Arizona, 1999. Feet instead wheels allowed to moveeasier in dust. Legs were moved by mechanic springs which contract and extend under the action of an electric current. A simple concept. Pict from 'Science et Vie', Sept 1999.
|
 |
Four legged robots of Shigeo Hirose. The Hirose-Fukushima Robotic Laboratory, Tokyo, is one of the most prolific producer of any kind of robots : first snake-like robots (see chap 'Tracked and snakes robots'), walking, wheeled and crawler, planetary, wall climbing, colony robots. Majority of walking robots are 4 legs : from up to down and L to R : Kumo 1976, PV-II 1978-79, Titan III 1981-84, Titan V 1985, Titan VIII, Titan IX. http://www-robot.mes.titech.ac.jp/robot/walking_e.html |
 |
Walking robots of Shigeo Hirose, researcher in robots at Tokyo Institute of Technology from1976. Pict : from upper to down and L to R : Yanbo III 2000 with legs and wheels, Hyperion 1999, Walker-Roller 1994 with legs and wheels (see chap Robot Locomotion), Parawalker II 1997, Air Hopper 2002 jumping, Titrius 2000. http://www-robot.mes.titech.ac.jp/robot/walking_e.html |
 |
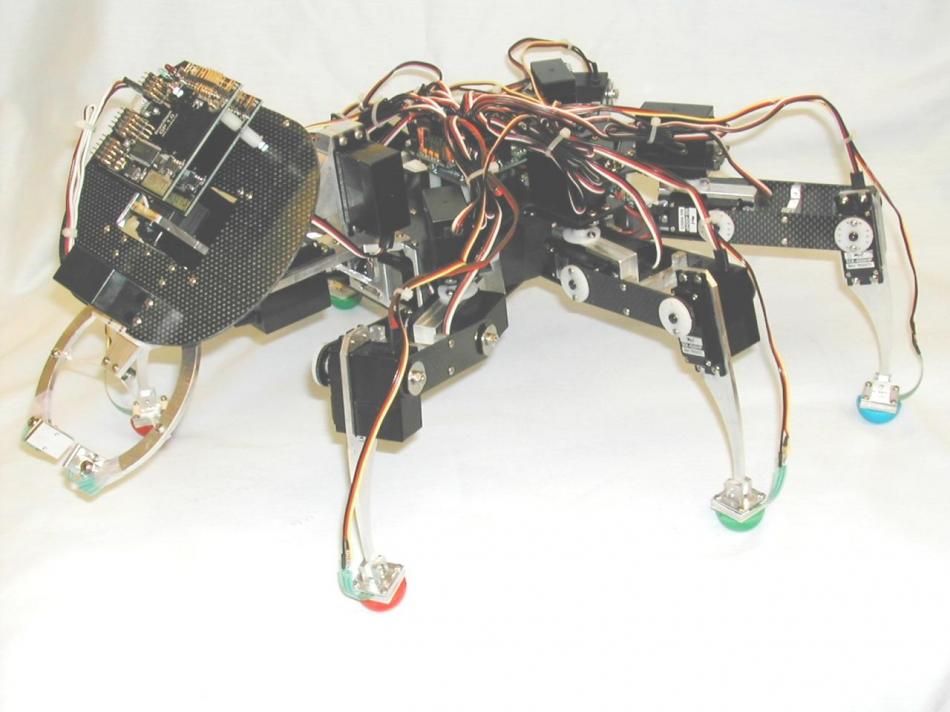
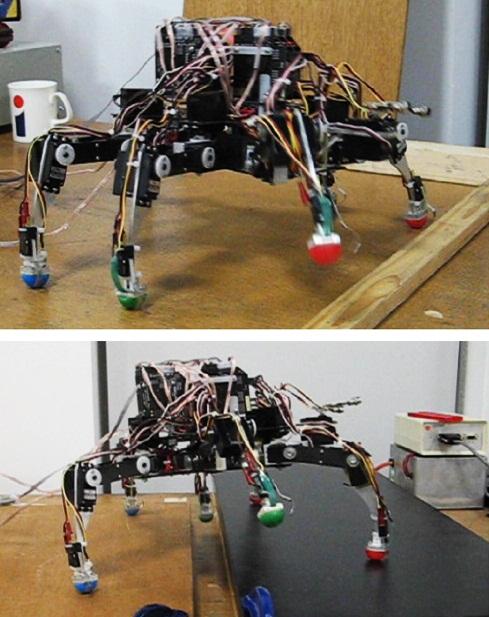
Little Dog of Boston Dynamics is used by several Universities to study and learn about legged locomotion. It is able to cross, slowly, rocky terrains. http://www.bostondynamics.com/robot_littledog.html http://www.youtube.com/watch?v=nUQsRPJ1dYw |
 |
Cheetah Fastest Legged Robot of Boston Dymamics that gallops at 28 km/h, inside on a treadmill. http://www.bostondynamics.com/robot_cheetah.html |




























































 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa