|

|
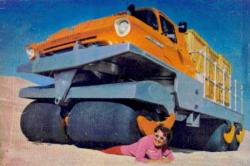
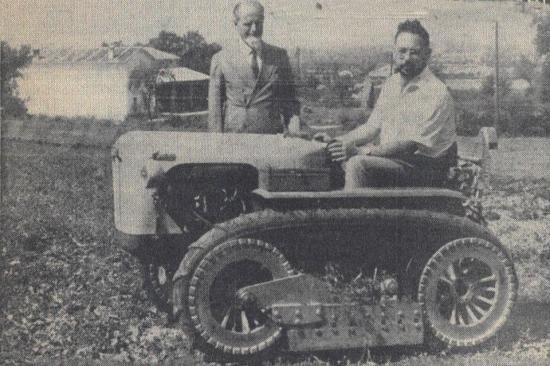
1 - In 1938, R. G. LeTourneau used the real wheel with flotation tires witch were based on the aircraft tires of Tournapull Model A. Firestone manufactured them in molds belonging to LeTourneau. Pict. From book ‘The LeTourneau Legend’ by Philip G. Gowenlock, Paddington Publications Pty. Ltd, 1996.
|
|
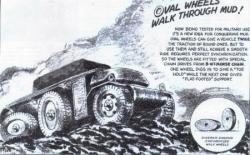
2 - William Albee invented Rolligons in 1955, very large and softrollers for muddy terrains. Catco employs about thirty Rolligons in Alaska to preserve the environment and Goodyear markets a tire like Rolligon, the Terra-tire. Pict on cover of Mechanix Illustrated Dec 1957.
|
|

|
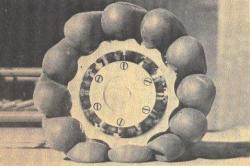
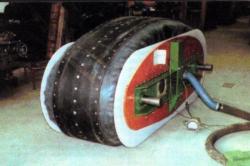
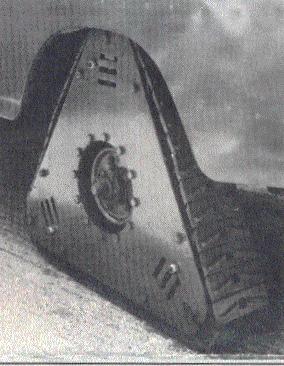
3 - In the fifties, Nicholas Straussler conceived also a large tire without sidewall, the "Lypsoïd" tire. It can be seen here mounted on a Bareiros truck. He also fitted Kraka and Tricar FN-AS 24. Pict of Bareiros brochure, J M M collection.
|

|
4 - For Elie P. Aghnides, the hemispherical wheels of his Rhino prototype built by Marmon-Herrington in 1954 was the ideal propulsion. The vehicle could not theoretically roll over. Pict of Automobil Revue, 17 Nov 1954. http://www.amphibiousvehicle.net/frameproto.html
|
|

|
5 - Ernst Meili became known in 1958 with the Metrac but he had already built in 1943 the spring wheeled prototype to mitigate the lack of rubber.
Picture from book of Gerold Röthlin ‘From Autotractor to modern special vehicles’ from Verlag Gerold Röthlin, Kriens, 2004.
|

|
6 - Terrastar of the Lockheed Corporation resumed in 1967 the old principle of the star wheel to climb the barriers. The craft turned out better in the deep mud and water. Pict from Lockheed, J M M collection. http://www.visi.com~dc/tristar/bkground.htm
|
|

|
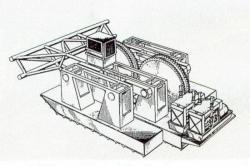
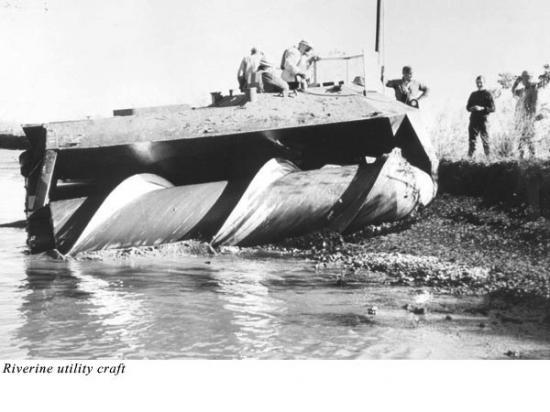
7 - RUC : Riverine Utility Craft (picture) of Chrysler Corporation and WES Waterways Experiment Station, Vicksburg, in 1969, travelled at 46 km/h on marshy terrain. Ford tractors also had been equipped in 1928 of two Archimedean screws, some of them worked a long period in the 30s on a building site in the Sierra Nevada. Japan tried also screw vehicles. They failed on dry soils and sand but in the Netherlands, the same principle is always applied on Amphirol (or Amfirol). Pict from : http://gsl.erdc.usace.army.mil/gl-history/Chap8.htm
|
|
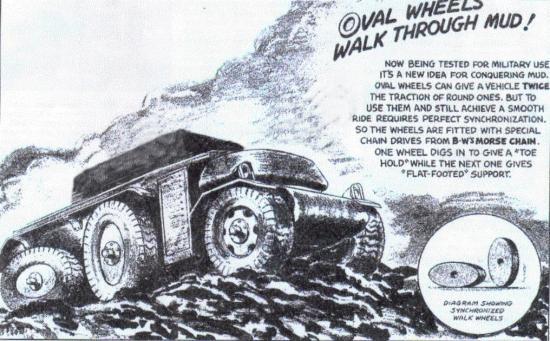
8 - Many Kopczynski patents on elliptical wheels exist. Scale models were built and US Army tried a M7 tractor Allis Chalmers fitted with elliptical wheels in 1946. See Chap : 'The Wheel Reinvented'. This form of wheel was designed to climb over obstacles and increase traction. The idea of square wheels exists too. Pict from Wheels and Tracks N° 16, 80s.
|
|
|
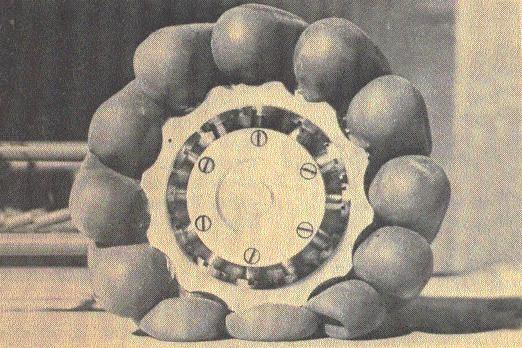
9 - Rotoped, invented by Julius Mackerle in 1968, consisted of shaped tubes balloon. To move, a distributor inflated rear balloons, emptying those of front and the vehicle moved on by gravity. The lack of torque and slip ensured good progress on soft ground. Pict from l'Auto Journal, April 1969.
|

|
10 - J. A. Bombardier invented a soft and silent caterpillar in the 30's on his snowmobile. Its patent for additional caterpillar tractors track in the 50's made sales of the brand rebound. Bombardier became famous later with its snowmobile : the Ski-doo. Pict from : b3200f0y !!fao.org!docrep! http://museebombardier.com/fr/content/jab/biographie.htm
|
|

|
11 - In 1980, the Finncat snowmobile presented a directional caterpillar instead of skis at front. Many patents exist on this subject since 1904, that is to say from the beginning of tracks. With this system, it was then possible to move elsewhere than on snow. Pict from etuvas1 and : http://www.geocities.com/finncat2002/album1.html
|

|
12 - The amphibious Marsh Buggies equipped with tracks replace vehicles with huge floating wheels of the fifties. Crossbars of the track surround the floating pontoons. The main brands are in the USA, in the Nordic countries and Japan. Pict from : http://wilcomarshbuggies.com/aboutus.html and / or: http://www.marshmaster.com/
|
|

|
13 - Bonmartini in 1963 combining the tire and the track which should provide some gentle running of the tracked gear. Pict from l'Argus, 23 Jan 1964.
|

|
14 - The Yeti looks like a star wheel as the Terrastar on which they have added a caterpillar : it rolls or all revolves around the central axis. Invention by Peter Sullivan in 1984 and marketed at the time by 4x4 Developments Ltd, GB. Pict from : Power Farming sept 1983.
|
|
|
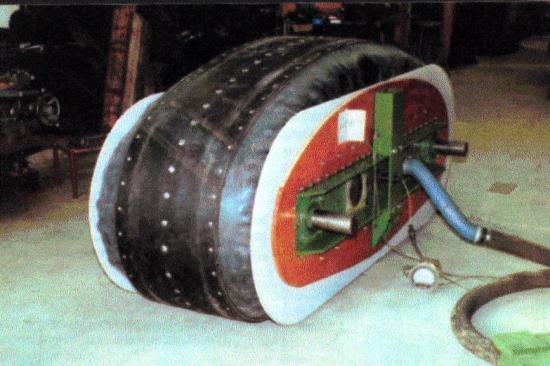
15 - Bertelsen in 1986 thought he could adapt the principle of air-cushion to the pneumatic track. Pict from : http://www.aeromobile.com/airtrack_article1.PDF
|

|
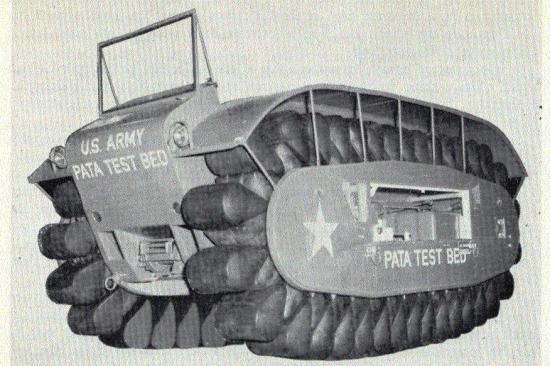
16 - PATA of Ling-Temco-Vought Aerospace from 1960. It had crawlers equipped with air-filled chambers. The focus was on problems of overheating and punctures. Pict from : The Engineer 18 Fevr 1966.
|
|

|
17 - The Airoll of Borg Warner in 1962 was also the tracked counterpart of the Terrastar wheeled star. It was traveling at 40 mph and excelled in the sloughs. Subject also to punctures, seven copies were nevertheless built, however. Pict : US Army 1962. http://www.almc.army.mil/alog/PDFDocs/1969sep_oct/artp16_69so.pdf
|
|

|
18 - According to a Kitchen’s patent in the 30’s, the Loopwheel of Lockheed in 1970 was a curved elastic and light strip of titanium alloy for Mars robots and land vehicles. The ELMS vehicle (1985) had four independent Loopwheels and could run on the slopes while remaining horizontal. Pict : mars-sgi.com trakrov loopwheel1.
|
|

|
19 - The walking draglines skates were adopted in the early of twentieth century : they were more resistant than the caterpillars. A dragline Buckyrus Erie is represented here. From Internet.
|
|

|
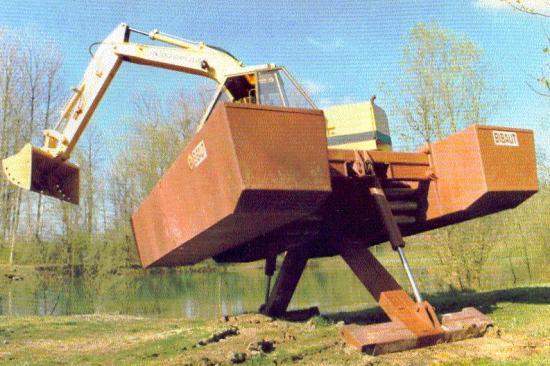
20 - Bibault fitted to the 80’s chassis of aquatic shovels with legs supporting the floats that could slide in rails. This is also a form of walking. It was very convenient for the release of muddy shores. This unique model is still working. Pict from Bibault brochure, J M M collection. http://www.bibaut-environnement.fr/index.php
|
|
|
21 - R. G. LeTourneau created the Tree Stomper Model 6-120 in 1965 to clear very little lift land where Jungle Crusher sunk. Well suited because of its large surface contact, the craft was moving in advancing his skates. Very powerful in the marshy land covered with dense vegetation, it proved however vulnerable because of its weight.
Pict. From book ‘The LeTourneau Legend’ by Philip G. Gowenlock, Paddington Publications Pty. Ltd, 1996.
|
|

|
|
|

|
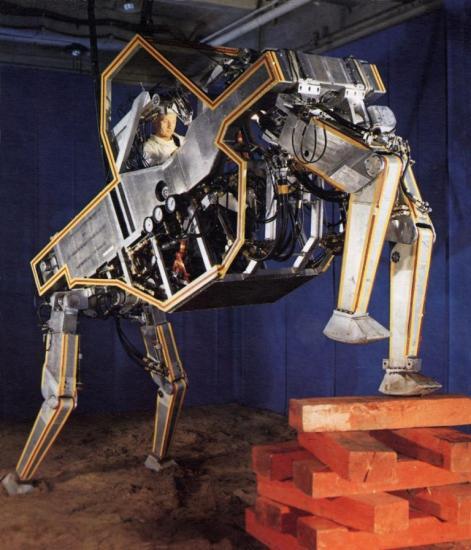
23 - Walking Truck of General Electric in 1966, whose legs reproduced the movements of the driver by servomechanisms, could walk at 8 km/h and carry loads of 250 kg on huge obstacles. It was a fine performance at an age where computers hardly existed. Pict from http://davidbuckley.net/DB/HistoryMakers/HM-GE-Truck1968.htm. http://www.transchool.eustis.army.mil/Museum/Cybernetic.htm
|
|

|
24 - As the most current Big Dog of Boston Dynamics, it can walk at 5 km / h with 50 kg payload on slopes of 35 °. It does not reverse even during a side impact. A gasoline engine operates pumps and hydraulic cylinders. Pict from the site of Boston Dynamics. http://www.bostondynamics.com/content/sec.php?section=BigDog
|

|
25 - Centipede walking Machine of Meredith Thring, 1967, from Australia and England, walked by modification of wheels and chains. From http://cyberneticzoo.com/tag/meredith-thring/.
|
|

|
26 – The Rhex of University of Michigan has 6 legs, which actually behave like wheels. It is now marketed
by Boston Dynamics of Boston. Pict from the site of Boston Dynamics. http://www.rhex.net/
|
|

|
27 - The snake robot OT-4 at the University of Michigan can overcome significant obstacles. Its propulsion is provided not by crawling but by tracks on the four sides. It comprises 7 elements pitch and direction (not roll) controlled articulation. Long and narrow, the robot can theoretically squeeze through the rubble at disaster. Pict from University of Michigan on Internet. http://www.engin.umich.edu/research/mrl/OmniTread_Video.html
|
| |
|
| |
|
| |
|


















 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa