THE WHEEL REINVENTED
The text is at the bottom of the page
|
|
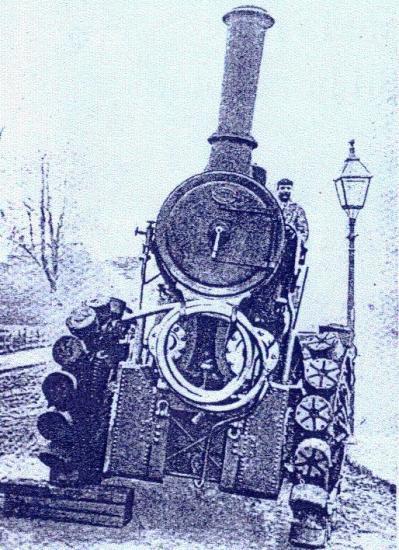
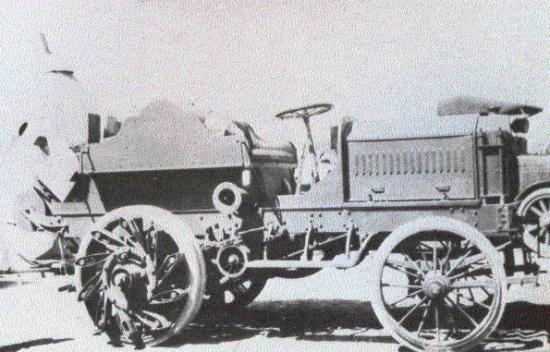
1 - Four wheels drive Diplock Tractor, 1902, with its studs 'pedrials'. Pict from Revue des Engins 09/2002 by Francis Pierre issued from the book : In a century of Traction Engines published in 1959. |
|
|
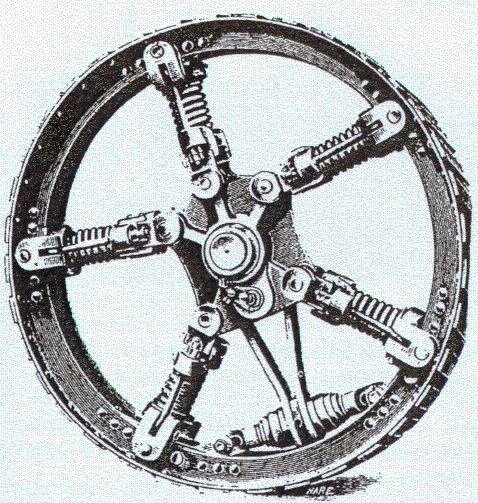
2 - Fowler wheel with spring system in 1870. Pict from Revue des Engins 09/2002 by Francis Pierre. |
|
|
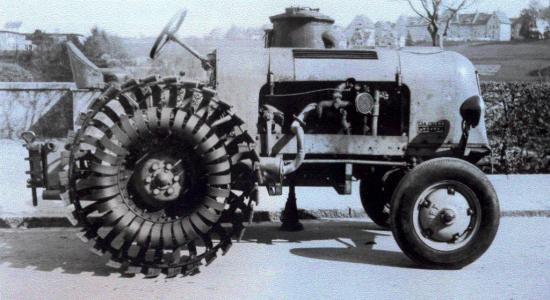
3 - Spring wheel for agricultural tractor seen in 2000 at the Sinsheim Museum, Germany. Pict J M M. |
|
|
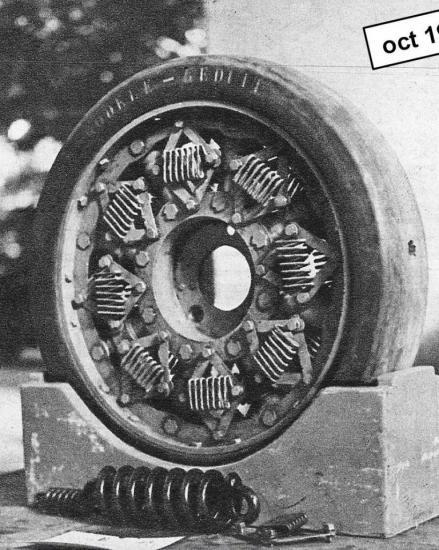
4 - Spring wheels in 1943 of the Meili firm tractors at Schaffhausen then Schübelbach, Switzerland, answered rather the shortage of rubber.Picture from book of Gerold Röthlin ‘From Autotractor to modern special vehicles’ from Verlag Gerold Röthlin, Kriens, 2004. |
|
|
5 - A spring-wheel for all-terrain vehicle is submitted late to the Motor Show 1950. Pict of review l'Automobile, N° 54, Oct 1950, Special 'Salon de Paris', on Picassaweb. |
|
|
6 - The Grumman MOLAB of 1964 consists of two watertight modules suspended on leaf springs as spokes ofwheels. From http://spacecollective.org/eric/2101/Spaceships-Proposed-Lunar-Vehicles |
|
|
7 - The Grumman in 1965 with strange deformable conical wheels surrounded by flexible strips. http://projectswordtoys.blogspot.fr/2008/10/grumman-lrv-real-thing.html |
|
|
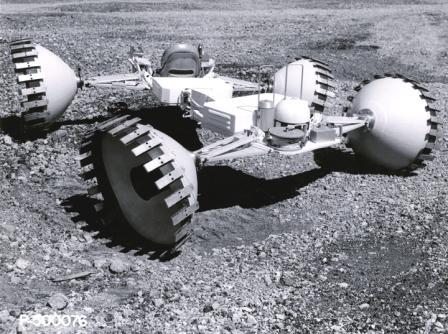
8 - The Bendix 1969 weighs about 800 kg for 8.4 m long. The steel tires are 2 m in diameter, its titanium rings involved the suspension together with a rod connected to a torsion bar. An electric motor was attached to each wheel. Pict from the review 'L'Auto Journal', 9 April 1970. |
|
|
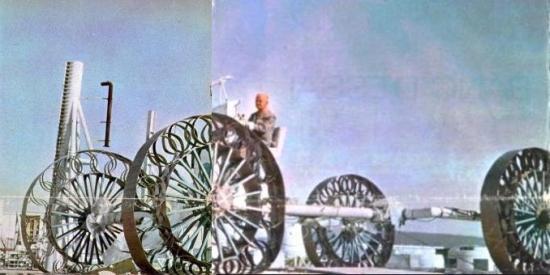
9 - The lattice wheel, studied and calculated by Mieczyslaw Gregory Bekker, the father of Theory of Off-road Locomotion in the laboratories of General Motors in Santa Barbara, California, in the 60s. It was chosen for the 4WD Lunar Roving Vehicle by Boeing (GM), which landed on the moon. Pictured, M. G. Bekker is sitting in the middle, Sam Romano, standing, Ferenc Pavlics, probably early 80s. A prototype of Boeing 6x6 articulated wire wheeled had been built in earlier stages. Pict from the collection of Jean Rémus, former member of ISTVS. https://books.google.fr/books?id=Q92nGnDBMX0C&pg=PA70&lpg=PA70&dq=sam+romano+Mieczys%C5%82aw+G.+Bekker&source=bl&ots=zq7i9M8zA0&sig=Z5EYnrrSz8GXcCCHkDL0bfpFSGc&hl=fr&sa=X&ei=ezMHVagwiNtTvpSDoAI&ved=0CCIQ6AEwAA#v=onepage&q=sam%20romano%20Mieczys%C5%82aw%20G.%20Bekker&f=false |
|
|
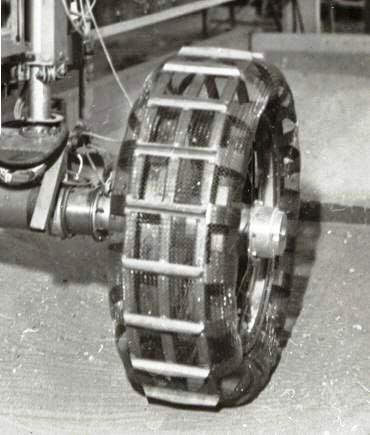
10 - Robot wheels of Company VNII Transmash of St Petersburg. |
|
|
11 - The Tweel of Michelin tested in 2006 in South Carolina and adapted on wheeled loader. Pict from Michelin in site http://www.autoevolution.com/news-image/history-of-the-wheel-7334-2.html |
|
|
12 - Rear view of an articulated Tolotti & Pavesi tractor, Milan, P4 model 1925, with solid tires and foldable spikes, seen in Sinsheim in 2000. Pict J M Maclou. |
|
|
13 - Tractor Phoenix and Buckeye in 1916, with an average extra traction by retractable spikes.Picture from book of Fred Crismon ‘US Military Wheeled Vehicles’, Crestline Publishing (Motorbook), 1983. |
|
|
14 - 'Rubbertrax' unbreakable solid tires wheels. From flat-proof-tires site |
|
|
15 - LeTourneau L-2350 loader, with 4 m in diameter and 1.8 m wide tires. The mass of the tire alone was 6.8 t. The rim and the chain of protection were more. Huge ! |
|
|
16 - Best Tractor Manufacturing Co in 1900. The wide wheels reduced ground pressure but congestion becomes maximum. Overall width requires a triangulation of maintenance. The tractor got stuck in bogs and extract has not been an easy task. Pict from Journal of Teramechanics, June 1979. |
|
|
17 - Rolligon 4450 of Rolligon Corporation itself purchased in 2006 by National Oilwell Varco Inc., Houston, Texas. http://cr4.globalspec.com/thread/32772/What-s-the-Best-Vehicle-for-Carrying-a-Load-Through-Deep-Mud |
|
|
18 - The transport company CATCO, Alaska, still employs Bechtel vehicles of the 70's rebuilt among others by Rimpull. Pict from site flikr. |
|
|
19 - MVTOu-2 in 1958. The Russians were not far behind. Pict from 'Les Véhicules tout terrain' Tome I by Alain Dupouy, Grenoble, 1995. |
|
|
20 - Barreiros Truck, TT-90 from 1958 restored in 2008, equipped with 'Lypsoïd' tires. Pict from 1.bp.blogspot.com, which is no more in line. |
|
|
21 - Gas Truck 66 equipped of tire-hoops, similar to the Lypsoïd tires. Pict http://krepish.ucoz.ru/index/0-2 |
|
|
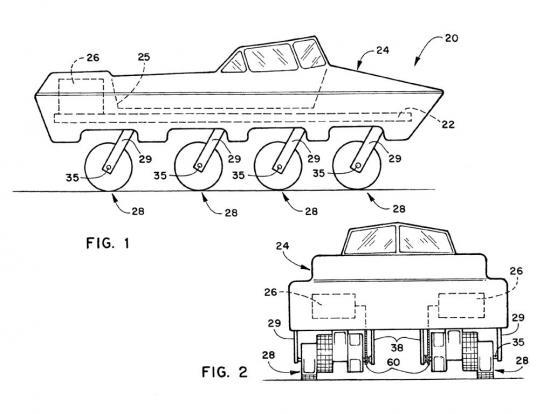
22 - Amphibious craft with wheels, Quality Marsh brand, now Wilco Marshes Buggies & Dragline, Inc., Louisiana. Pict from the good site www.amphibiousvehicle.net. |
|
|
23 - Hydrostatic transmission amphibious buggy manufactured by AMG, St Gaudens, until the 80's. Weighing a total of 13 t, 2 t payload, it was powered by a Deutz 160 hp engine with wheels of 2.96 m diameter and 1.5 m wide. Speed of 8 km / h on land and 5 in water. It included an anchor into the ground by four rods to counter air turbulence caused by landing a helicopter on its platform. Today, the wheeled buggies are replaced by tracked vehicles. Pict from a brochure of AMG, J M M collection.
|
|
|
24 - Tree-Crusher of LeTourneau launched in the early 60's. The G-80 measured 15 m long for 475 hp and 65 t, had electric transmission and a direction by joint. He overthrew the trees with its front bar, crushed and sank the branches in the ground with his metal rollers. The only known survivor, a G-175, is located in Mc Kenzie, British Columbia, Canada. Pict from LeTourneau brochure, J M M collection |
|
|
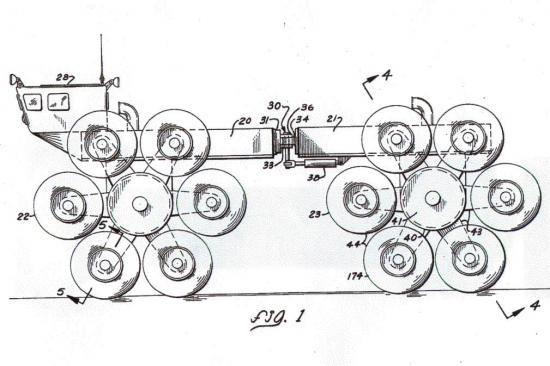
25 - Since the early 2000 exists the 'Swamp Thing' of the manufacturer Paul Wever Construction Equipment, Illinois, prototype with 8 large rollers for wetlands, for a logging company in Georgia. This 'Swamp Thing' weighs 90 ton on hard ground and 45 t maximum on water. It can be radio controlled up to 60 m. Pict from http://www.pwce.com/Blank12.htm |
|
|
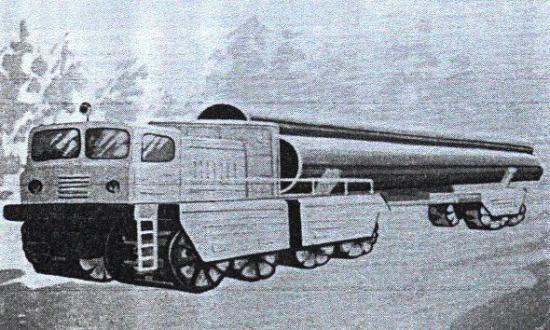
26 - It seems that Russians studied in the 60's tire rolled pipeline carrier, at least in scale model. Pict from 'Les Véhicules tout terrain' Tome I by Alain Dupouy, Grenoble, 1995. |
|
|
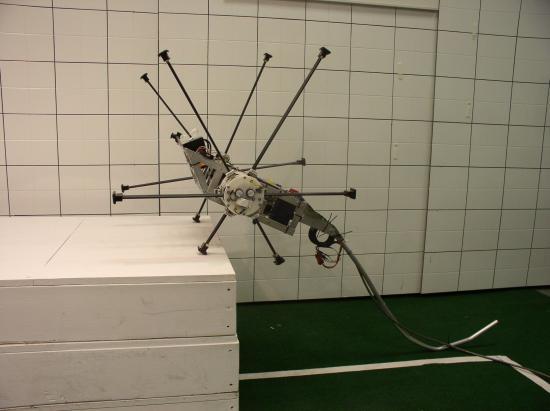
27 - The 6x6 robot Marsokhod is fully articulated in pitch, roll and yaw. Robot for Mars Exploration, tested in the United States and France (known as LAMA) but designed in St. Petersburg, Russia, by VNII Transmash in the early 90's, it includes bevel wheels ending a cylinder fitted with spikes. A copy is currently on display at the Musée des Arts et Métiers in Paris and this robot is now marketed. http://www.youtube.com/watch?v=agq2GXlmjcs |
|
|
28 - The floating wheels made of large inflatable cylinders adapted by Nicolas Straussler in the 50's on a Jeep allow it to move in water. Pict from Wheels and Tracks N° 44, 1993. |
|
|
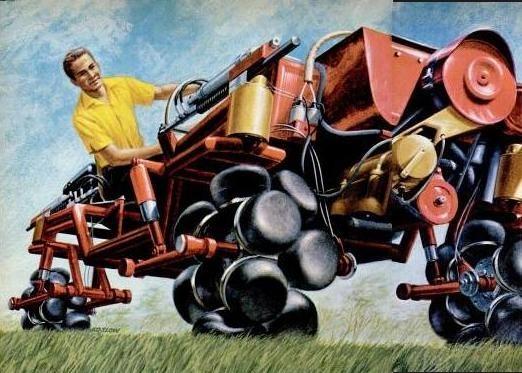
29 - Rotoped of Julius Makerle. Although this picture is a reproduction of a drawing, this machine really existed. Pict Popular Science, Jan 1970. |
|
|
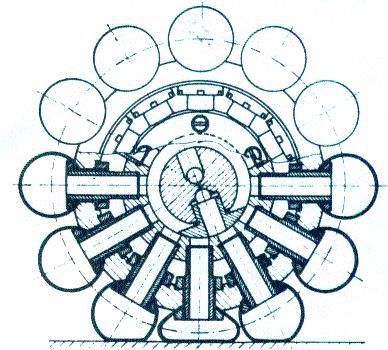
30 - The Rotoped system was simple : the ball in front of the wheel emptied while the back one swelled with valves. The wheel moved forward by gravity. Pict Popular Science Jan 1970. |
|
|
31 - The M7 tractor from Allis Chalmers, normally fitted with tracks to the rear wheels equipped with elliptical wheels for testing.http://blog.hemmings.com/index.php/2008/12/17/elliptical-wheels-innovative-leap-forward-or-crackpot-idea/ |
|
|
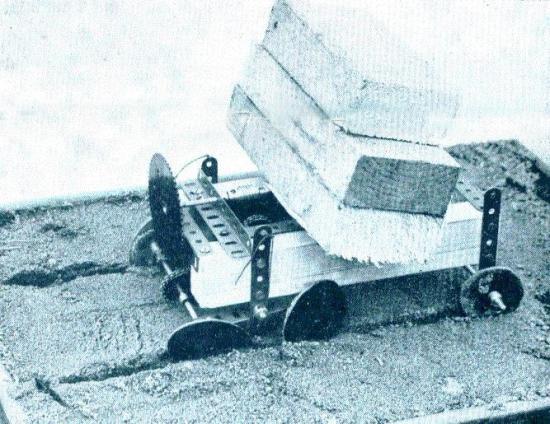
32 - O. A. Goulden also undertook tests on scaled model. Pict from Revue Générale du Caoutchouc, Nov 1955, J M M collection. |
|
|
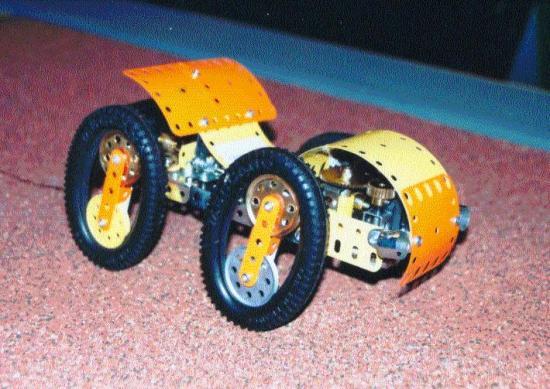
33 - 'Meccano' construction set lends itself well to this kind of achievement seen in 1998 at an exhibition at the Porte de Versailles in Paris. Pict J M M. |
|
|
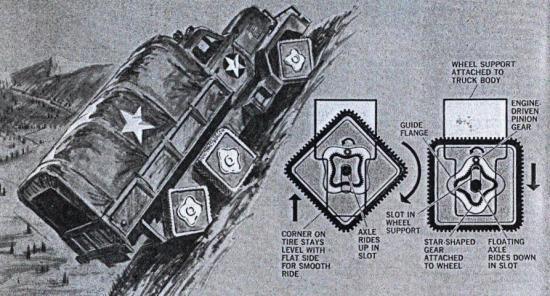
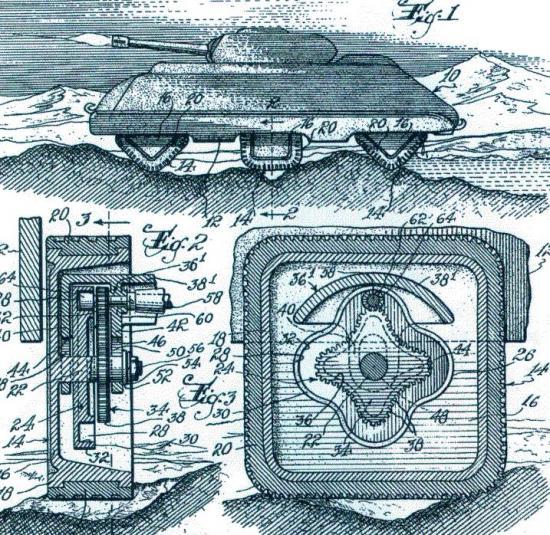
34 and 35 - Square wheels, whose patents have been found on the Internet, show that a practical implementation would be too complex compared to the advantage gained : crossing obstacles. Pict from Popular Mechanics, Apr 1970. |
|
|
34 and 35 - Square wheels, whose patents were found on the Internet, show that a practical implementation would be too complex compared to the advantage gained. From Google patent. |
|
|
36 - A bicycle with square wheels, of course, but with a special road ! http://cgm.cs.mcgill.ca/~athens/cs507/Projects/2004/Emory-Merryman/background.html |
|
|
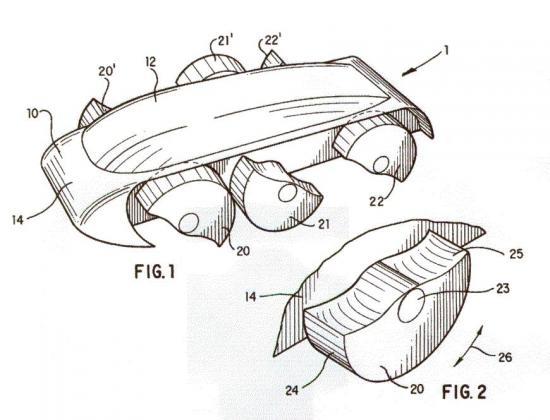
37 - Car with curvilinear triangle wheel-shaped, an original idea but rather theoretical. Google patent : us002790503-001 patent of Kopczynski, 1967 |
|
|
38 - Half-wheels, 1999 patent. A prototype could be built ! Horizontality warranted on roads through the gap of half-wheels at 180 °. Google patent. us005881831, 1999 |
|
|
39 - Here they are 1 / 3 wheel offset and juxtaposed on the width and length of the vehicle. On the road, the vehicle is running smoothly horizontally. To try ! Google patent : us07128175 in 2006 |
|
|
40 - Running legs Russian vehicle. This is a drawing but no doubts that concrete realization would bring new in off-road locomotion. It is similar to Whegs, at the end of this chapter. Pict from the book of Alain Dupouy 'Les Véhicules tout terrain, Tome I', Alain Dupouy, auto-editeur, Grenoble,1995. |
|
|
41 - Rhino had good amphibian qualities. Pict of Life Archives. |
|
|
42 - View from the front of the Rhino : it looks like a monster ! Pict of Life Archives |
|
|
43 - Bottom view of Rhino. The center of gravity positioned very low and hemispherical wheels were preventing to rollover. What was it in reality ? It is doubtful as the ground path is narrow. Pict Popular Science, 1954. |
|
|
44 - The low-pressure spherical wheel swallows obstacles, even on a wheelbarrow. From openlearn.ac.uk |
|
|
45 - Terrastar in 1967 from the Lockheed Aircraft Service Company, Sunnyvale, California, a subsidiary of Lockheed. At the time, aircraft manufacturers were often diversified in all-terrain vehicles. Pict from Lockheed, J M M collection. |
|
|
46 - Landmaster : it can be seen in action in the movie of 1974 : 'Damnation Alley'. The site of Dan Jeffries shows us the father of this extraordinary vehicle and other achievements. http://www.tombsofkobol.com/films/damnalley-01.html |
|
|
47 - The chassis of the Landmaster is in two parts. The Landmaster steers by articulation unlike the rigid Terrastar skid steers. Pict from J M M collection. |
|
|
48 - The ‘Gato Arana' seen at the Motor Show of Barcelona in 1972. He could climb steps of 1 m by using rotors. On the other side, it seems that the minor wheels were fixed on the rotors. Jóse Artes de Arcos, 1893-1985, important car Spanish industrial of ‘Fabrica de Accesorios para Automobiles y Motocycletas', Barcelona, built in 1971 the amphibian 6x6 ‘El Gato Montes' and this one that looks like a little Terrastar. Does it still exists ? http://www.autopasion18.com/HISTORIA-GATO%20MONTES.htm
|
|
|
49 - 1965 patent of a star wheeled vehicle with 6 minor wheels by rotors. Times were favorable to little unbridled ideas and achievements that arose. Genuine innovations spread through different areas. us3208544. |
|
|
50 - 'Meccano' model of a star wheeled vehicle seen in an exhibition at the Porte de Versailles in Paris in 1998. Pict from J M M. |
|
|
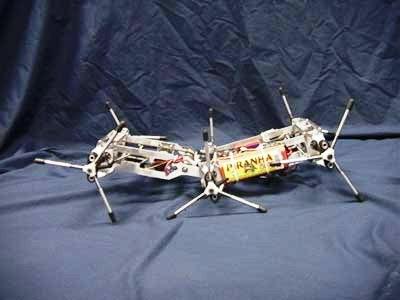
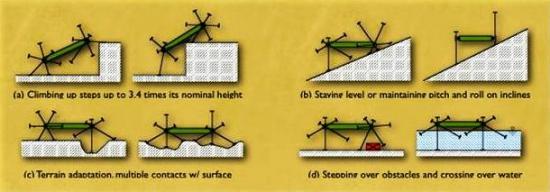
51 - Whegs : amid pitch articulation promotes crossings.http://biorobots.cwru.edu/projects/whegs/whegs.html |
|
|
52 - Whegs 2nd generation whose 'legs' contain portions of rims. http://biorobots.cwru.edu/projects/whegs/whegs.html |
|
|
53 and 54 - Whegs Impass : we can see the sliding rays automatically adaptable to the terrain. The mechanism must be sealed for outdoor use but the practical implementation must be delicate.
|
|
|
53 and 54 - Whegs Impass : they can see the sliding rays automatically adaptable to the terrain. The mechanism must be sealed for outdoor use and the practical implementation must be delicate. http://www.yourepeat.com/watch/?v=16w7i41f7hA&feature=youtube_gdata http://runa15.s368.xrea.com/p5/youtube.php?v=b1ZH0qoO_UY |
|
|
55 - The University of Bremen also built, among other things, Whegs : it can be seen the robot Asguard II on the impressive obstacles trail in the Centre of Robotic Innovation. http://robotik.dfki-bremen.de/en/research/robotsystems/asguard-ii.html |
|
|
56 - Rhex of Boston Dynamics. By programming differently rotation of the legs, it is possible to replicate the rapid march of the dogs, back somersaults and swimming in water. http://www.bostondynamics.com/bd_index.html |
|
|
57 - The Collineo Company, Drummondville, Quebec, a service company helping high-tech industries in the areas of civil protection and field operations, creates all-terrain robots such as micro-hydraulic reconfigurable Toolkit 4 or 6 wheels, in collaboration with DRDC Suffield (Defence R & D Canada). It includes suspension arm in two parts and 14 degrees of freedom with electric motors or hydraulic units. These arms can best bridge and climb the difficult slopes by reducing the action of the wheels at the expense of arms that mimic walking : the center of gravity moves (inching system or peristaltic mode) without wheels. The robot Hylos of the Institute for Intelligent Systems and Robotics, Paris, and Work Parter of Helsinki University, Finland had also articulated arms with wheels so that the articulated 6x6 Marsokhod robot originally studied in Saint Petersburg by the Company Transmash had an expandable frame (but no legs) that allowed him to accompany action of the wheels. http://www.collineo.net/content/blogcategory/15/40/lang,en/ |




































 Français
Français
 English
English
 Español
Español
 Italiano
Italiano
 Deutsch
Deutsch
 Nederlands
Nederlands
 Portuguesa
Portuguesa